
Унифицированные аналоговые сигналы в системах автоматики
Создавая систему автоматизации для того или иного технологического процесса, мы так или иначе вынуждены как-то сопрягать датчики и другие сигнальные устройства — с исполнительными устройствами, с преобразователями, с контроллерами и т. д. Последние, как правило, принимают сигнал от датчика в форме напряжения или тока определенной величины (если речь об аналоговых сигналах), или в форме импульсов с определенными временными параметрами (в случае с цифровыми сигналами).
Параметры этих электрических сигналов должны неким вполне определенным образом соответствовать параметрам физической величины, которую фиксирует датчик, чтобы управление конечным устройством получилось бы адекватным задаче автоматизации.
Безусловно, удобнее всего унифицировать аналоговые сигналы от различных датчиков, дабы контроллеры обрели универсальность, чтобы пользователю не приходилось бы для каждого датчика подбирать свой индивидуальный вид интерфейса, а для каждого интерфейса — свой датчик.
Пусть характер сигналов ввода-вывода станет унифицированным — решили разработчики, ведь при таком подходе процессы разработки систем автоматизации и блоков автоматики для промышленности сильно упростятся, а устранение неисправностей, обслуживание и модернизация оборудования станут значительно гибче. Даже если один датчик выйдет из строя, то вовсе не придется искать точно такой же, достаточно будет подобрать аналог с соответствующими выходными сигналами.
Измерения температуры среды, оборотов двигателя, давления в жидкости, механического напряжения образца, влажности воздуха и т. д. — зачастую осуществляется путем обработки непрерывных аналоговых сигналов, получаемых с соответствующих датчиков, при этом автоматически корректируется непрерывная работа сопряженного устройства: нагревательного элемента, частотного преобразователя, насоса, пресса и т. д.
В качестве аналогового сигнала наиболее часто служит либо сигнал напряжения, изменяющийся в диапазоне от 0 до 10 В, либо токовый сигнал, изменяющийся в диапазоне от 4 до 20 мА.
Управление напряжением от 0 до 10 В
Когда используется унифицированный сигнал напряжения от 0 до 10 В, то этой непрерывной последовательности напряжений от 0 до 10 В ставится в соответствие последовательность измеряемых физических величин, например давлений или температур.
Скажем, температура изменяется от -30 до +125°С, при этом напряжение изменяется от 0 до 10 В, причем 0 вольтам соответствует температура в -30°С, а 10 вольтам +125°С. Это может быть температура реагента или обрабатываемой детали, причем промежуточные значения температуры будут иметь строго определенные значения напряжения из обозначенного диапазона. Зависимость здесь не обязательно линейна.

Таким образом можно осуществлять управление различными устройствами, а также получать информацию для мониторинга. Например, радиатор с термодатчиком имеет аналоговый выход для отображения текущей температуры: 0 В — температура поверхности радиатора +25°С или ниже, 10 В — температура достигла +125°С — максимально допустимой.
Или подавая от контроллера напряжение от 0 до 10 В на аналоговый вход насоса, задаем давление газа в контейнере: 0 В — давление равно атмосферному, 5 В — давление равно 2 атм, 10 В — 4 атм. Подобным образом можно управлять нагревательными приборами, двигателями станков, клапанами и прочей арматурой и приводами различного назначения.
Управление током (токовая петля от 4 до 20 мА)
Второй вид унифицированного аналогового сигнала для управления автоматикой — токовый сигнал 4-20 мА, называемый «токовой петлей». Данный сигнал используется так же для получения сигналов от различных датчиков с целью управления исполнительными устройствами.
В отличие от сигнала напряжения, токовый характер сигнала позволяет передавать его без искажений на значительно большие расстояния, поскольку падения напряжений на линиях и на сопротивлениях автоматически компенсируются. Кроме того очень проста диагностика целостности передающих цепей — если ток есть, значит линия цела, если тока нет — имеет место обрыв. Именно по этой причине наименьшее значение 4 мА, а не 0 мА.
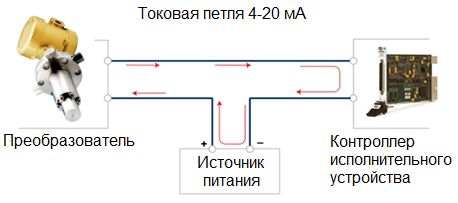
Итак, здесь в качестве источника энергии управляющего сигнала используется источник тока, а не источник напряжения. Соответственно, контроллер исполнительного устройства должен иметь токовый вход 4-20 мА, а преобразователь датчика — токовый выход. Допустим, имеется у частотного преобразователя управляющий токовый вход 4-20 мА, тогда при подаче на вход сигнала 4 мА или менее — управляемый привод остановится, а при подаче тока в 20 мА — разгонится на полные обороты.
Между тем, токовые выходы датчиков могут быть как активными, так и пассивными. Чаще выходы пассивные, это значит, что необходим дополнительный источник питания, который включается последовательно в цепь с датчиком и контроллером исполнительного устройства. Для датчика или контроллера с активным выходом — источник питания не потребуется, так как есть встроенный.
Аналоговая токовая петля используется сегодня в инженерной практике чаще, чем сигналы напряжения. Она может использоваться на расстояниях до нескольких километров. Для защиты оборудования применяется гальваническая развязка на оптоэлектронных приборах, например оптронах. Из-за неидеальности источника тока, максимально допустимая длина линии (и максимальное сопротивление линии) зависит от напряжения, от которого питается источник тока.
Например при типичном напряжении питания 12 вольт сопротивление не должно превышать 600 Ом. Диапазоны токов и напряжений описаны в ГОСТ 26.011-80 «Средства измерений и автоматизации. Сигналы тока и напряжения электрические непрерывные входные и выходные».
Средство унификации первичного сигнала — нормирующий преобразователь
Для унификации первичного сигнала с датчика — для преобразования его в напряжение от 0 до 10 В или в ток от 4 до 20 мА, — применяют так называемые нормирующие преобразователи. Такие нормирующие преобразователи выпускаются для датчиков температуры, влажности, давления, веса и т. д.

Принцип работы датчика может быть разным: емкостный, индуктивный, сопротивления, термопара и т.д. Однако выход для удобства дальнейшей обработки сигнала должен соответствовать требованиям унификации. Вот почему датчики зачастую оснащаются нормирующими преобразователями измеряемой величины в ток или в напряжение.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Аналоговые, дискретные и цифровые сигналы
Любая физическая величина по характеру изменения ее значения может быть постоянной (если она имеет только одно фиксированное значение), дискретной (если она может иметь два или более фиксированных значений), или аналоговой (если она может иметь бесчисленное множество значений). Все эти величины могут быть преобразованы в цифровую форму.
Аналоговым называется такой сигнал, который может быть представлен непрерывной линией из множества значений, определенных в каждый момент времени относительно временной оси. Значения аналогового сигнала произвольны в каждый момент времени, поэтому он может быть в принципе представлен как некая непрерывная функция (зависящая от времени как от переменной) либо как кусочно-непрерывная функция времени.
Аналоговым сигналом можно назвать, например, звуковой сигнал, генерируемый обмоткой электромагнитного микрофона или ламповым акустическим усилителем, поскольку такой сигнал непрерывен и его значения (напряжение или ток) сильно отличаются друг от друга в каждый момент времени.
На приведенном ниже рисунке изображен пример подобного рода аналогового сигнала.
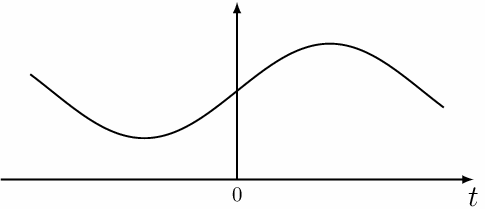
Аналоговые величины могу иметь бесконечное множество значений в определенных пределах. Они непрерывны и их значения не могут изменяться скачками.
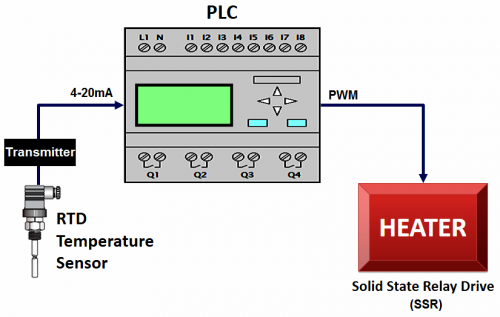
Пример аналогового сигнала: термопара передает в аналоговом виде значение температуры в программируемый логический контроллер, который управляет с помощью твердотельного реле температурой в электрической печи.
Если некий сигнал принимает произвольные значения лишь в отдельные моменты времени, то такой сигнал называют дискретным. Чаще всего на практике применяются дискретные сигналы, распределенные по равномерной временной решетке, шаг которой называется интервалом дискретизации.
Дискретный сигнал принимает определенные не нулевые значения лишь в моменты дискретизации, то есть он является не непрерывным в отличие от аналогового сигнала. Если из звукового сигнала вырезать небольшие кусочки определенного размера через равные интервалы, такой сигнал можно будет назвать дискретным.
Ниже приведен пример формирования подобного дискретного сигнала с интервалом дискретизации Т. Обратите внимание, что квантуется лишь интервал дискретизации, но не сами значения сигнала.
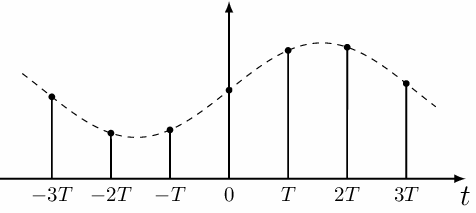
Дискретные сигналы имеют два и более фиксированных значений (количество их значений всегда выражается целыми числами).
Пример простого дискретного сигнала на два значения: срабатывание путевого выключателя (переключение контактов выключателя в определенном положении механизма). Сигнал с путевого выключателя может быть получен только в двух вариантах — контакт разомкнут (нет действия, нет напряжения) и контакт замкнут (есть действие, есть напряжение).

Когда дискретный сигнал принимает только какие-то фиксированные значения (которые могут быть расположены по сетке с определенным шагом), такие что они могут быть представлены как количество квантовых величин, такой дискретный сигнал называется цифровым. То есть цифровой сигнал — это такой дискретный сигнал, который квантован не только по промежуткам времени, но и по уровню.
Практически дискретные и цифровые сигналы в ряде задач отождествляются, и могут быть легко заданы в форме отсчетов с помощью вычислительного устройства.
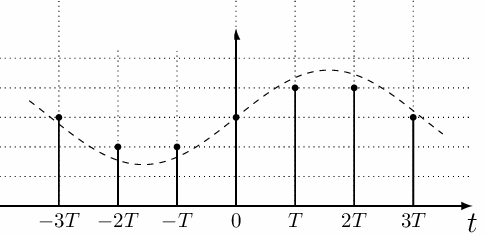
На рисунке приведен пример формирования цифрового сигнала на базе аналогового. Обратите внимание, что значения цифрового сигнала не могут принимать промежуточных значений, а только определенные — целое количество вертикальных шагов сетки.
Цифровой сигнал легко записывается и перезаписывается в память вычислительных устройств, просто считывается и копируется без потери точности, тогда как перезапись аналогового сигнала всегда сопряжена с утратой некоторой, пусть и незначительной, части информации.
Обработка цифровых сигналов позволяет получать устройства с очень высокими характеристиками благодаря выполнению вычислительных операций совершенно без потерь качества, либо с пренебрежимо малыми потерями.
В силу этих достоинств, именно цифровые сигналы повсеместно распространены сегодня в системах хранения и обработки данных. Вся современная память — цифровая. Аналоговые носители информации (такие как пленочные кассеты и т.д.) давно ушли в прошлое.
Аналоговый и цифровой приборы для измерения напряжения:

Но даже у цифровых сигналов есть свои недостатки. Их невозможно передать напрямую как есть, ибо передача обычно реализуется посредством непрерывных электромагнитных волн. Поэтому при передаче и приеме цифровых сигналов необходимо прибегать к дополнительной модуляции и аналого-цифровому преобразованию. Меньший динамический диапазон цифровых сигналов (отношение наибольшего значения к наименьшему), обусловленный квантованностью значений по сетке, является еще одним их недостатком.
Существуют и такие области, где аналоговые сигналы незаменимы. Например аналоговый звук никогда не сравнится с цифровым, поэтому ламповые усилители и пластинки до сих пор не выходят из моды, несмотря на обилие цифровых форматов записи звука с самой высокой частотой дискретизации.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Аналоговый сигнал для приводов
![]()

Группа: Участники форума
Сообщений: 31
Регистрация: 24.9.2015
Пользователь №: 278537



![]()

Группа: Участники форума
Сообщений: 857
Регистрация: 27.4.2008
Пользователь №: 18181
Недостаточно информации: Вам нужно, чтобы приводы вращались примерно с одинаковой скоростью? Или как?
Самый обычный частотник может выдать на аналоговый выход величину частоты (которая измеряется в Гц). Надо понимать, что частота (Гц) и частота вращения (об/мин) — это разные величины, они отличаются на величину скольжения. Скольжение — величина порядка 1-5%, соответственно в таких системах будет примерно такое отклонение частот вращения. Там можно покудесничать и уменьшить отклонение с помощью функции slip compensation (компенсация скольжения).
Частотники с векторным управлением могут выдать на аналоговый выход фактическую частоту вращения, это уже лучше. Но не все это умеют.
Все упирается в требования Вашей задачи.
![]()
Группа: Участники форума
Сообщений: 684
Регистрация: 6.3.2014
Пользователь №: 226003
В принципе не цифровым методом задание не может быть точным, какой бы величиной оно не являлась. Всё зависит от требуемой точности.
Сообщение отредактировал mr_Frodo64 — 29.5.2016, 22:06
![]()
Группа: Участники форума
Сообщений: 105
Регистрация: 20.8.2014
Пользователь №: 242499
![]()
Группа: Участники форума
Сообщений: 31
Регистрация: 24.9.2015
Пользователь №: 278537
Недостаточно информации: Вам нужно, чтобы приводы вращались примерно с одинаковой скоростью? Или как?
Самый обычный частотник может выдать на аналоговый выход величину частоты (которая измеряется в Гц). Надо понимать, что частота (Гц) и частота вращения (об/мин) — это разные величины, они отличаются на величину скольжения. Скольжение — величина порядка 1-5%, соответственно в таких системах будет примерно такое отклонение частот вращения. Там можно покудесничать и уменьшить отклонение с помощью функции slip compensation (компенсация скольжения).
Частотники с векторным управлением могут выдать на аналоговый выход фактическую частоту вращения, это уже лучше. Но не все это умеют.
Все упирается в требования Вашей задачи.
Привода Mitsubichi Electric FR D-740. 1-эй ведомый привод вращается с большей частотой (порядка 5Гц), чем ведущий привод. С аналогового выхода 1-го ведомого привода сигнал 0-10В поступает на аналоговые входа 0-10В 2-го и 3-го ведомых приводов. 2-ой и 3-ий ведомые привода — привода двух ленточных конвейеров. В обычном режиме 2-ой и 3-ий ведомые двигаются одинаково со скоростью 1-го ведомого привода, а по сигналу (дискретному) с контроллера один из них начинает ускоряться (сброс), а второй наоборот — замедляться. Теоретически (надеюсь и практически) я представляю четко, как смогу реализовать данный алгоритм. Здесь получается одновременно задача и синхронизации и асинхронизации приводов. К точности синхронизации в моем случае не предъявляются высокие требования. Насчет компенсации скольжения — хороший совет, буду пробовать.
Источник



