
Частотное регулирование асинхронного двигателя
Частотное регулирование угловой скорости вращения электропривода с асинхронным двигателем в настоящее время широко применяется, так как позволяет в широком интервале плавно изменять обороты вращения ротора как выше, так и ниже номинальных значении.
Частотные преобразователи являются современными, высокотехнологичными устройствами, обладающими большим диапазоном регулирования, имеющими обширный набор функций для управления асинхронными двигателями. Высочайшее качество и надежность дают возможность применять их в различных отраслях для управления приводами насосов, вентиляторов, транспортеров и т.д.

Частотные преобразователи по напряжению питания подразделяются на однофазные и трехфазные, а но конструктивному исполнению на электромашинные вращающиеся и статические. В электромашинных преобразователях переменная частота получается за счет использования обычных или специальных электрических машин. В статических частотных преобразователях изменение частоты питающего тока достигается за счет применения не имеющих движения электрических элементов.
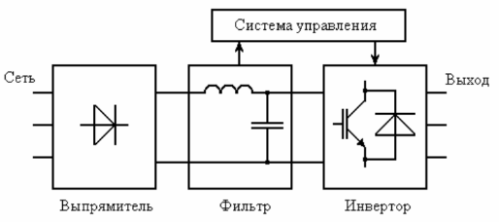
Схема частотного преобразователя асинхронного двигателя
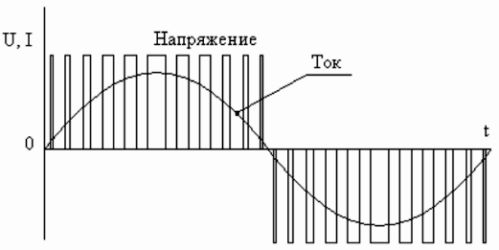
Выходной сигнал преобразователя частоты
Преобразователи частоты для однофазной сети позволяют обеспечить электропривод производственного оборудования мощностью до 7,5 кВт. Особенностью конструкции современных однофазных преобразователей является то, что на входе имеется одна фаза с напряжением 220В, а на выходе — три фазы с тем же значением напряжения, что позволяет подключать к устройству трехфазные электродвигатели без применения конденсаторов.
Преобразователи частоты с питанием от трехфазной сети 380В выпускаются в диапазоне мощностей от 0,75 до 630 кВт. В зависимости от величины мощности устройства изготавливаются в полимерных комбинированных и металлических корпусах.
Самой популярной стратегией управления асинхронными электродвигателями является векторное управление. В настоящее время большинство частотных преобразователей реализуют векторное управление или даже векторное бездатчиковое управление (этот тренд встречается в частотных преобразователях, первоначально реализующих скалярное управление и не имеющих клемм для подключения датчика скорости).
Исходя из вида нагрузки на выходе, преобразователи частоты подразделяются по типу исполнения:
для насосного и вентиляторного привода;
для общепромышленного электропривода;
эксплуатируется в составе электродвигателей, работающих с перегрузкой.
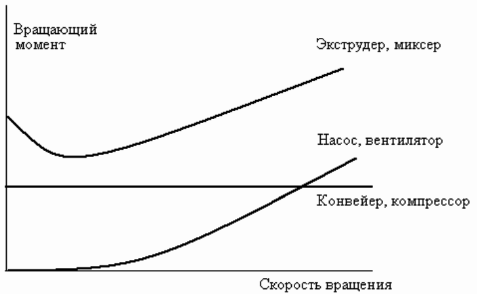
Механические характеристики типичных нагрузок
Современные преобразователи частоты обладают разнообразным набором функциональных особенностей, например, имеют ручное и автоматическое управление скоростью и направлением вращения двигателя, а также встроенный потенциометр на панели управления. Наделены возможностью регулирования диапазона выходных частот от 0 до 800 Гц.
Преобразователи способны выполнять автоматическое управление асинхронным двигателем по сигналам с периферийных датчиков и приводить в действие электропривод по заданному временному алгоритму. Поддерживать функции автоматического восстановления режима работы при кратковременном прерывании питания. Выполнять управление переходными процессами с удаленного пульта и осуществлять защиту электродвигателей от перегрузок.

Связь между угловой скоростью вращения и частотой питающего тока вытекает из уравнения
При неизменном напряжении источника питания U1 и изменении частоты изменяется магнитный поток асинхронного двигателя. При этом для лучшего использования магнитной системы при снижении частоты питания необходимо пропорционально уменьшать напряжение, иначе значительно увеличатся намагничивающий ток и потери в стали.
Аналогично при увеличении частоты питания следует пропорционально увеличивать напряжение, чтобы сохранить магнитный поток постоянным, так как в противном случае (при постоянном моменте на валу) это приведет к нарастанию тока ротора, перегрузке его обмоток по току, снижению максимального момента.
Рациональный закон регулирования напряжения зависли от характера момента сопротивления.
При постоянном моменте статической нагрузки (Mс = const) напряжение должно регулироваться пропорционально его частоте U1/f1 = const. Для вентиляторного характера нагрузки соотношение принимает вид U1/f 2 1 = const.
При моменте нагрузки, обратно пропорциональном скорости U1/ √ f1 = const.
На рисунках ниже представлены упрощенная схема подключения и механические характеристики асинхронного двигателя при частотном регулировании угловой скорости.
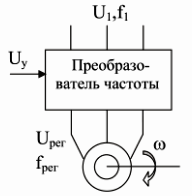
Схема подключения частотного преобразователя к асинхронному электродвигателю
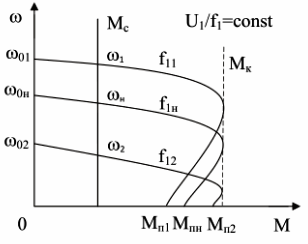
Характеристики для нагрузки с постоянным статическим моментом сопротивления
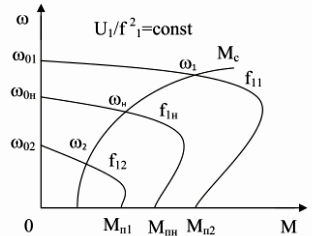
Х арактеристики для нагрузки вентиляторного характера
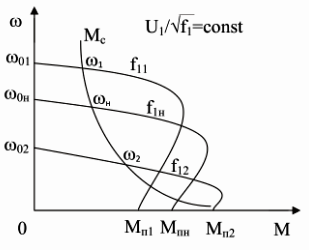
Характеристики при статическом моменте нагрузки обратно пропорциональном угловой скорости вращения
Частотное регулирование скорости асинхронного двигателя позволяет изменять угловую скорость вращения в диапазоне — 20. 30 к 1. Регулирование скорости асинхронного двигателя вниз от основной осуществляется практически до нуля.
При изменении частоты питающей сети верхний предел частоты вращения асинхронного двигателя зависит от ее механических свойств, тем более что на частотах выше номинальной асинхронные двигатель работает с лучшими энергетическими показателями, чем на пониженных частотах. Поэтому, если в системе привода используется редуктор, это управление двигателем по частоте следует производить не только вниз, но и вверх от номинальной точки, вплоть до максимальной частоты вращения, допустимой но условиям механической прочности ротора.
При увеличении оборотов вращения двигателя выше указанного значения в ею паспорте частота источника питания не должна превышать номинальную не более чем 1,5 — 2 раза.
Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности мри гаком регулировании невелики, поскольку не сопровождаются увеличением скольжения. Получаемые при этом механические характеристики обладают высокой жесткостью.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Частотные преобразователи для асинхронных двигателей

До появления частотных преобразователей на рынке современной энергетики, электромонтёрам приходилось применять для подключения асинхронного двигателя стартовый или фазосдвигающий конденсатор большой ёмкости.
Двигатель при этом работал, но существенно терял мощность. Также, применение конденсаторов сильно разогревало обмотки двигателя, что сильно снижало его ресурс работы, и двигатели часто приходилось «перематывать». Учитывая, что обмотки асинхронного двигателя делаются из медной проволоки, то такие ремонты приносили большой ущерб.
Так как асинхронный двигатель является составной частью почти каждого современного привода, то вопрос создания частотного регулирования вставал на особый уровень. И вот, частотники уже повсеместно применяются для подключения электрического двигателя к сети и его управление.

По сути, частотный инвертор, это прибор, изменяющий частоту поданного на обмотки напряжения с ШИМ-регулированием. Благодаря частотнику, получилось подключить асинхронный двигатель к сети без ущерба его ресурсу, без перегрева, и ещё дать массу возможностей по управлению скоростью вращения вала.
Также, применяя различные интерфейсы передачи данных и команд, применение частотников позволило объединить все приводы большого предприятия в одно диспетчерскую систему управления и контроля параметров.
В мир современной автоматизации технологических процессов, это весомый аргумент.
Устройство частотных преобразователей
Современный частотный инвертер состоит из двух принципиальных блоков. Первый блок полностью сглаживает напряжение и на выходе выдаёт постоянное. Постоянное напряжение подаётся на силовой блок генерации частоты. После преобразования, на выходе из второго блока частота напряжения уже будет такая, какая задана настройкой.
За возможность изменять частоту напряжения отвечает микропроцессор, который встроен в частотник. Используя заданную программу, процессор следит за выходной частотой напряжения, а также за параметрами работы электрического двигателя.

По сути, частотные преобразователи для асинхронных двигателей принцип работы которых заключён в простом вырабатывании нужной частоты переменного тока, это модуляторы нужной природы напряжения, которая необходима для того или иного оборудования. Именно это и снизило негативное влияние на работу электрического двигателя, которое имело место быть при использовании конденсатов.
Электрический двигатель получает именно такое напряжение, которое положено ему для нормальной и полноценной работы.
Считаем нужным отметить, что и при наличии линии трёхфазного напряжения, не всегда рационально подключать электрический двигатель к сети просто через выключатель. В таком случае, двигатель будет работать, но регулировать его работу не получится. Не получится и следить за состоянием обмоток.
В промышленном исполнении можно встретить два основных типа частотных преобразователей:

Специальный частотный преобразователь для асинхронного двигателя, схема которого несколько отличается от универсального, изготавливается под конкретное оборудование по конкретным потребностям. Как правило, это очень урезанные версии, не способные на работу с любым оборудованием.
Универсальные частотные инвертера могут работать, как и в специальном оборудовании, так и во всех остальных вариантах применения. На то они и универсальные, что их можно настраивать и программировать под любые нужды.
Поэтому, выбор частотного преобразователя для асинхронного двигателя должен быть не столько продиктован конкретными необходимостями производства, но и возможностью модернизации оборудования.

Практически во всех частотниках сегодня реализована возможность установки и контроля режима работы электрического двигателя с пульта управления. Первый интерфейс управления встроен в сам корпус частотника. Там же есть и ручка регулирования скорости вращения двигателя.
Но можно и применять выносные пульты управления. Которые можно располагать как в диспетчерской, так и непосредственно на станке, который приводится в движение электрическим двигателем.
Такое чаще встречается в ситуациях, когда станок с двигателем находится в помещении, где не рекомендуется установка частотного инвертора. И его устанавливают вдали от оборудования.
Большая часть инвертеров частоты позволяют программировать работу оборудования. Но, задать программу просто с пульта управления не получится. Для этого используется интерфейс передачи данных и настройки, который, при помощи компьютера позволяет задать нужную программу работы.

Разница типов сигналов управления
При проектировании цеха очень важно учитывать, что общение частотных преобразователей с диспетчерским пультом будет происходить при помощи электрических импульсов по проводам связи. Пи этом, не стоит забывать, что разные стандарты связи по-разному влияют друг на друга. Посему, переда данных одним способом, может существенно снижать качество передачи данных другим способом.
Поэтому, расчет частотного преобразователя для асинхронного двигателя должен производиться не только по его электротехническим показателям, но и по показателям совместимости с сетью.
Выбор мощности частотного преобразователя
Вопрос мощности частотника, скорее всего, стоит на первом плане, при расчете привода для любого станка или агрегата. Дело в том, что большинство частотных инвертеров способны выдерживать большие перегрузки до 200 – 300 %. Но, это совсем не означает, что для питания электрического двигателя можно смело покупать частотник сегментом ниже, чем требуется по планированию.
Выбор мощности частотного преобразователя осуществляется с обязательным запасом в 20 – 30%. Игнорирование этого правила может повлечь за собой выход из строя частотного преобразователя и простой оборудования.

Также важно учитывать пиковые нагрузки, которые может выдерживать частотник. Дело в том, что при старте электрического двигателя его пусковые токи могут сильно превышать номинальные. В некоторых случаях, пусковой ток превышает номинальный в шесть раз! Частотик должен быть рассчитан на такие изменения.
Каждый электрический двигатель оборудован вентилятором охлаждения. Это лопасти, которые установлены в задней части двигателя и по мере вращения вала прогоняют через корпус мотора воздух.
Если электрический двигатель работает на пониженных оборотах, то мощности потока воздуха может не хватить для охлаждения.
В этом случае, нужно выбирать частотник с датчиками температуры двигателя. Или организовать дополнительное охлаждение.

Электромагнитная совместимость преобразователей частоты
При расчёте и подключении частотника к сети и электрическому двигателю, следует помнить, что он очень подвержен помехам. Также, преобразователь частоты может и сам стать источником помех для другого оборудования. Именно поэтому, все подключения к частотнику и от него выполняются экранированными кабелями и выдерживанием дистанции в 10 см друг от друга.

По своей сути, применение частного преобразователя для питания асинхронного электрического двигателя позволило существенно продлить жизнь электрического двигателя, дало возможность регулировать работу двигателя и хорошо экономить на расходе электрической энергии.
Источник



