
Большая Энциклопедия Нефти и Газа
Диапазон — регулирование — частота — вращение — двигатель
Диапазон регулирования частоты вращения двигателей при постоянной мощности того порядка, которая необходима в приводе главного движения большинства станков ( 5 — 10 кВт и более), обычно не перекрывает всего требуемого диапазона частот вращений шпинделя станка. Однако следует иметь в виду, что в постоянстве мощности двигателя во всем диапазоне нет необходимости. Суммарная мощность, расходуемая на резание и на потери холостого хода, растет с увеличением частоты вращения ( рис. 44 а), что оправдывает применение в главном приводе комбинирован -, ного регулирования. При этом нижняя часть диапазона регулирования осуществляется при постоянном моменте, а верхняя часть диапазона регулирования — при постоянной мощности. Это тем более целесообразно еще и потому, что полезная мощность ( рис. 44, б) в нижней части полностью не используется. [1]
Для расширения диапазона регулирования частоты вращения двигателей грузовой лебедки и механизма поворота в схеме предусмотрено частотное регулирование двигателей. Частоту вращения генератора изменяют путем изменения частоты вращения двигателя базового автомобиля педалью подачи топлива. [3]
Передаточные числа и диапазон регулирования частоты вращения двигателя выбираются обычно таким образом, чтобы общая характеристика была близка к кривой постоянной мощности. [4]
Требуемые механическая характеристика и диапазон регулирования частоты вращения двигателя могут быть получены изменением выпрямленного напряжения, снимаемого с тири-сторного выпрямителя. [5]
Для машин и механизмов с диапазоном регулирования частоты вращения двигателя до 100 и точным поддерживанием заданной скорости. [6]
Тиристорные преобразователи имеют относительно высокое эквивалентное внутреннее сопротивление, которое ограничивает диапазон регулирования частоты вращения двигателя . Для увеличения диапазона регулирования привода в системе ТП-Д применяют обратные связи по частоте вращения и току. При отрицательной обратной связи по частоте вращения и увеличении коэффициента усиления системы за счет введения операционных усилителей в цепь управления тиристорных преобразователей удается получить большой диапазон регулирования частоты вращения. [7]
Применение в системе генератор — двигатель ЭМУ в качестве генератора ( рис. 20) дает возможность значительного расширения диапазона регулирования частоты вращения двигателя . [9]
Для обеспечения вращения или перемещения планшайбы со сварочной скоростью в манипуляторах применяется система привода с электродвигателем постоянного тока и тиристорным преобразователем. Кратность диапазона регулирования частоты вращения двигателя ( отношение наибольшей частиш вращения к наименьшей) достигает 50 при постоянной скорости сварки. [11]
Для расширения диапазона регулирования частоты вращения двигателей грузовых лебедок и механизма поворота в схеме предусмотрено частотное регулирование двигателей. Частоту вращения генератора изменяют путем изменения частоты вращения двигателя базового автомобиля педалью подачи топлива. [12]
Влияние пульсаций выпрямленного тока на коммутацию двигателей выражается в сужении зоны темной коммутации по сравнению с питанием от генератора Постоянного тока и в появлении искрения под щетками. Обычно оценка ведется по действующему значению основной гармоники, которое должно быть в пределах 2 — 15 % номинального тока в зависимости от мощности, диапазона регулирования частоты вращения двигателя и допустимого снижения зоны темной коммутации. [13]
КЗ электрический ток подается катушкам магнитных пускателей Л и 26, в результате чего замыкаются их блок-контакты. Блок-контакты пп пускателя Л шунтируют пусковую кнопку КЗ, а пускатель Л переходит на самопитание. Через главные контакты аа, bb и ее пускателя Л питание от переключателя 1 подается к контроллерам 10, 12 и 13 лебедок подъема груза, механизма поворота и магнитным пускателем 14 и 15 стреловой лебедки. Электропривод подготовлен к работе. Включением контроллера 10, 12 или 13 приводят в движение соответствующий двигатель ( например, лебедок подъема груза МЗ, М4 или механизма поворота М2), а нажатием кнопок К7 или Кб — двигатель Ml лебедки подъема стрелы. Для включения электродвигателя МЗ, М4 или М2 рукоятку соответствующего контроллера 10, 12 или 13 переводят в первое положение. При этом замыкаются контакты dd, ее, ff и gg или hh и и в цепи статора соответствующего двигателя и одновременно подается напряжение на двигатели гидравлических толкателей 19, 11 и 22 тормозов грузовых лебедок, а также к электромогниту 16 тормоза механизма поворота, которые растормаживают тормоза своих механизмов. Для расширения диапазона регулирования частоты вращения двигателей грузовых лебедок и механизма поворота в схеме предусмотрено частотное регулирование двигателей. Частота тока изменяется в пределах 37 5 — 50 Гц, а напряжение — 320 — 400 В с помощью изменения частоты вращения генератора от 750 до 1000 об / мин. Частоту вращения генератора изменяют путем изменения частоты вращения двигателя базового автомобиля педалью подачи топлива. Опускание тяжелых грузов с малыми скоростями производят в режиме динамического торможения, который соответствует работе двигателя в качестве генератора. [14]
Источник
Как определяется диапазон регулирования скорости вращения электропривода
Диапазон регулирования – это отношение возможных установившихся скоростей D=wmax/wmin.
На сегодняшний день сформировалось два основных класса систем векторного управления — бездатчиковые системы (без датчика скорости на валу двигателя) и системы с обратной связью по скорости. Применение того или иного метода векторного управления определяется областью применения электропривода. При небольших диапазонах изменения скорости (не более 1:100) и требованиях к точности ее поддержания не более ±0,5% применяют бездатчиковое векторное управление. Если же скорость вращения вала изменяется в широких пределах (до 1:10000 и более), имеются требования к высокой точности поддержания скорости вращения (до ±0,02% при частотах вращения менее 1 Гц) или есть необходимость позиционирования вала, а также при необходимости регулирования момента на валу двигателя на очень низких частотах вращения, применяют методы векторного управления с обратной связью по скорости.
52 Как по каталожным данным АД определить sкр?
Номинальный момент на валу двигателя

Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м.
Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.

кратность максимального момента kм (перегрузочная способность)
53 Как по каталожным данным ДПТ можно определить сопротивление цепи якоря?
сопротивление якоря. Его можно найти в каталоге, либо непосредственным измерением. Если же ни то ни другое невозможно, для определения сопротивления  используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.  Где
Где  условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
54 Как по каталожным данным можно построить механическую характеристику ДПТ независимого возбуждения?
На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов МКР к МН и номинальное скольжение sH (при отсутствии величин сопротивлений). Для расчета кривой M = f (s) формулу Клосса (4.22) используют в следующем порядке: 1) по каталожным данным МН , MKP MH и sH определяют sKP ; 2) зная отношение  и SKP , задаются значениями s от 1 до 0 и по формуле (4.22) определяют момент в относительных единицах.
и SKP , задаются значениями s от 1 до 0 и по формуле (4.22) определяют момент в относительных единицах.
При известном значении номинального момента можно перевести относительные единицы момента в именованные. В области малых скольжений слагаемые
sKP s и 2sKP в формуле(4.22) значительно меньше s sKP и ими можно пренебречь. Тогда участкикривых M = f (s) и n = f (M) при малых скольжениях (рис. 4.4) будут
практически прямолинейными: минальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший
наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:

Формулы (4.22), (4.24) являются приближенными и дают погрешности, так как не учитывают падение напряжения в обмотках статора. Особенно велика погрешность при переходе из двигательного режима в генераторный. Однако для исследования одного режима выведенные формулы дают приемлемую для большинства расчетов точность.
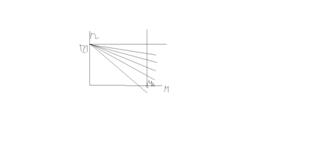
Рис. 4.4. Механические характеристики
при различных сопротивлениях роторной цепи
55 Как по формуле Клосса построить механические характеристики АД?
На практике широко используют приближенное аналитическое выражение механической характеристики с использованием данных, приведенных в каталогах на электродвигатели: кратность моментов  к
к  и номинальное скольжение
и номинальное скольжение  (при отсутствии величин сопротивлений).
(при отсутствии величин сопротивлений).
Для расчета кривой  формулу Клосса используют в следующем порядке:
формулу Клосса используют в следующем порядке:
1) по каталожным данным  и определяют
и определяют  ;
;
2) зная отношение  и , задаются значениями
и , задаются значениями  от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.
от 1 до 0 и определяют момент в относительных единицах. При известном значении номинального момента можно перевести относительные единицы момента в именованные.
В области малых скольжений слагаемые  и
и  значительно меньше
значительно меньше  и ими можно пренебречь. Тогда участки кривых и
и ими можно пренебречь. Тогда участки кривых и  при малых скольжениях будут практически прямолинейными:
при малых скольжениях будут практически прямолинейными:
 .
.
На рис. 3.4 построены рабочие участки (от холостого хода до номинальной нагрузки) механических характеристик для различных сопротивлений в цепи ротора в виде прямых линий, имеющих больший наклон при увеличении активного сопротивления ротора. Часто построение кривых моментов ведут по упрощенной формуле Клосса:


56 Как строятся механические характеристики ДПТ последовательного возбуждения?
В ДПТ с последовательным возбуждением поток возбуждения создаётся током якоря машины, для чего обмотка возбуждения и якорь двигателя включаются последовательно относительно источника питания, как показано на схеме рис. 6.13.

Обычно при токах  магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения
магнитная цепь машины не насыщена и поток возбуждения пропорционален току возбуждения  При больших токах якоря Iя>Iяном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным. Подставив в уравнение
При больших токах якоря Iя>Iяном магнитная цепь машины насыщена, и поток возбуждения можно считать постоянным. Подставив в уравнение  где
где  — сопротивление обмотки возбуждения, значение
— сопротивление обмотки возбуждения, значение  получим
получим  Зная, что
Зная, что  получим
получим  где C1, C2, C3 – постоянные. Поскольку в установившемся режиме Mэм =M, то
где C1, C2, C3 – постоянные. Поскольку в установившемся режиме Mэм =M, то  и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок M
и уравнение механической характеристики ДПТ с последовательным возбуждением в диапазоне нагрузок M
58 Какая электрическая машина и в каком режиме работает в точке «А»?

Двигатель постоянного тока в режиме рекуперативного торможения
Рекуперативное торможение (генераторный режим) с отдачей энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или другой причины угловая частота вращения ротора асинхронной машины превысит синхронную частоту ω0. В генераторном режиме скольжение s
Источник



