
- Электромагнитные и магнитные приводы.
- Магнитный привод
- Электромагнитный привод: типы, назначение, принцип работы
- Назначение привода
- Конструкция и составные части
- Принцип работы механизма
- Исполнительные действия электромагнитного привода
- Электромагнитная арматура
- Рабочие параметры привода
- Блочные приводные системы
- Особенности встроенного привода
- Сферы применения устройства
- Заключение
Электромагнитные и магнитные приводы.
Электромагнитные и магнитные зажимные устройства выполняют преимущественно в виде плит и планшайб для закрепления стальных и чугунных заготовок с плоской базой. На рис.7.5 показана схема плиты, в корпусе 1 которой заключены электромагниты 6. Заготовку 5 устанавливают на крышку 2. В крышке выполнены полюсы 3, округленные изоляцией 4 из немагнитного материала (латунь, нержавеющая сталь, эпоксипласт). Толщина изоляции обычно не превышает 5мм. Магнитный поток замыкается через заготовку, проходя через корпус и крышку плиты. Удерживающая сила возникает в местах контакта заготовки с полюсами и крышкой плиты.
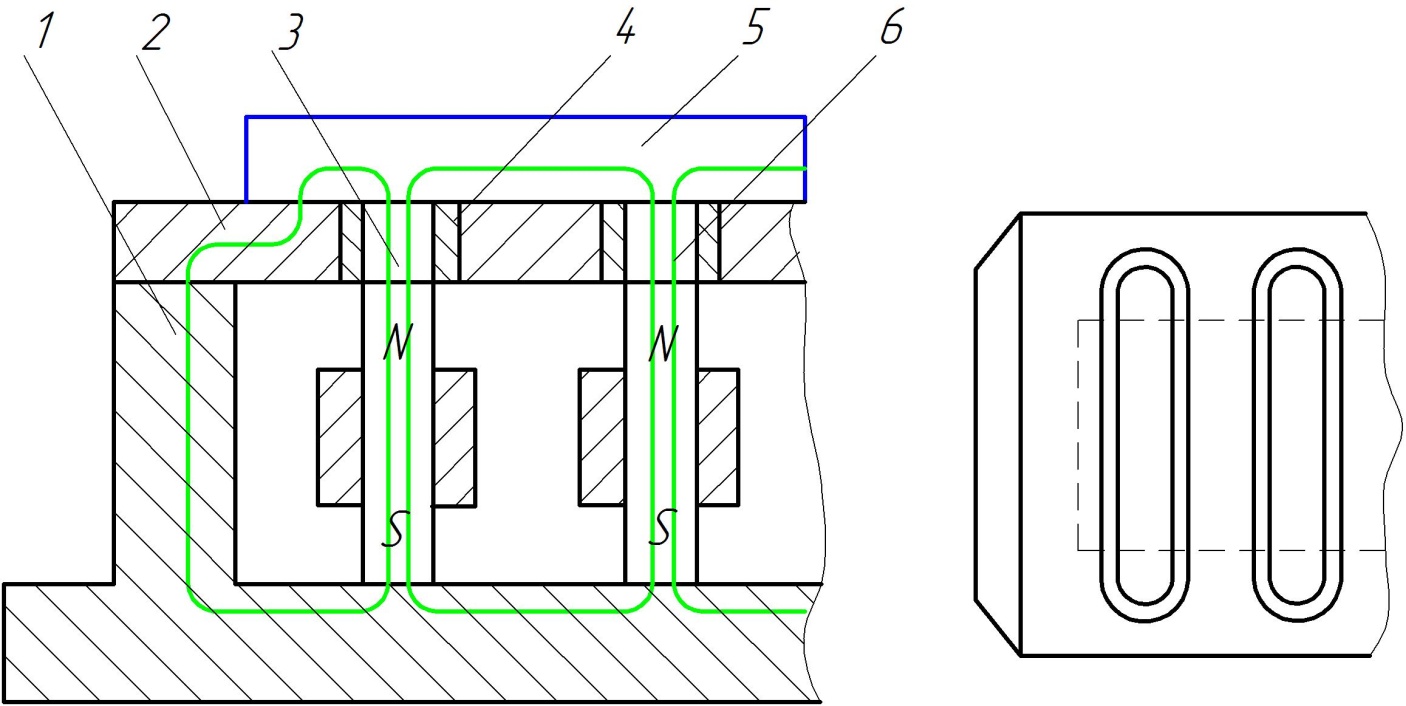 Рис.7.5 Электромагнитная плита.
Рис.7.5 Электромагнитная плита.
Сердечники электромагнитов и полюса крышки изготовляют из стали 10, а остальные детали плит — из сталей 10 и 15 или из чугуна СЧ12. Рабочая поверхность плиты шлифуется до Ra=0,63-0,32мкм; отклонение от прямолинейности не должно превышать 0,02мм на длине 300мм. Питание электромагнитных плит производится постоянным током (номинальное напряжение 24, 48, 110 и 220 В) от моторгенераторов, меднозакисных (корпусных) или селеновых выпрямителей.
На рис.7.6 показана магнитная призма для закрепления цилиндрических заготовок. При горизонтальном положении поворотного постоянного магнита 4 магнитный поток проходит через обе щеки призмы 3, разделенные немагнитной пластиной 2, и через заготовку 1. При вертикальном положении магнита поток замыкается в корпусе призмы и заготовку можно снимать.
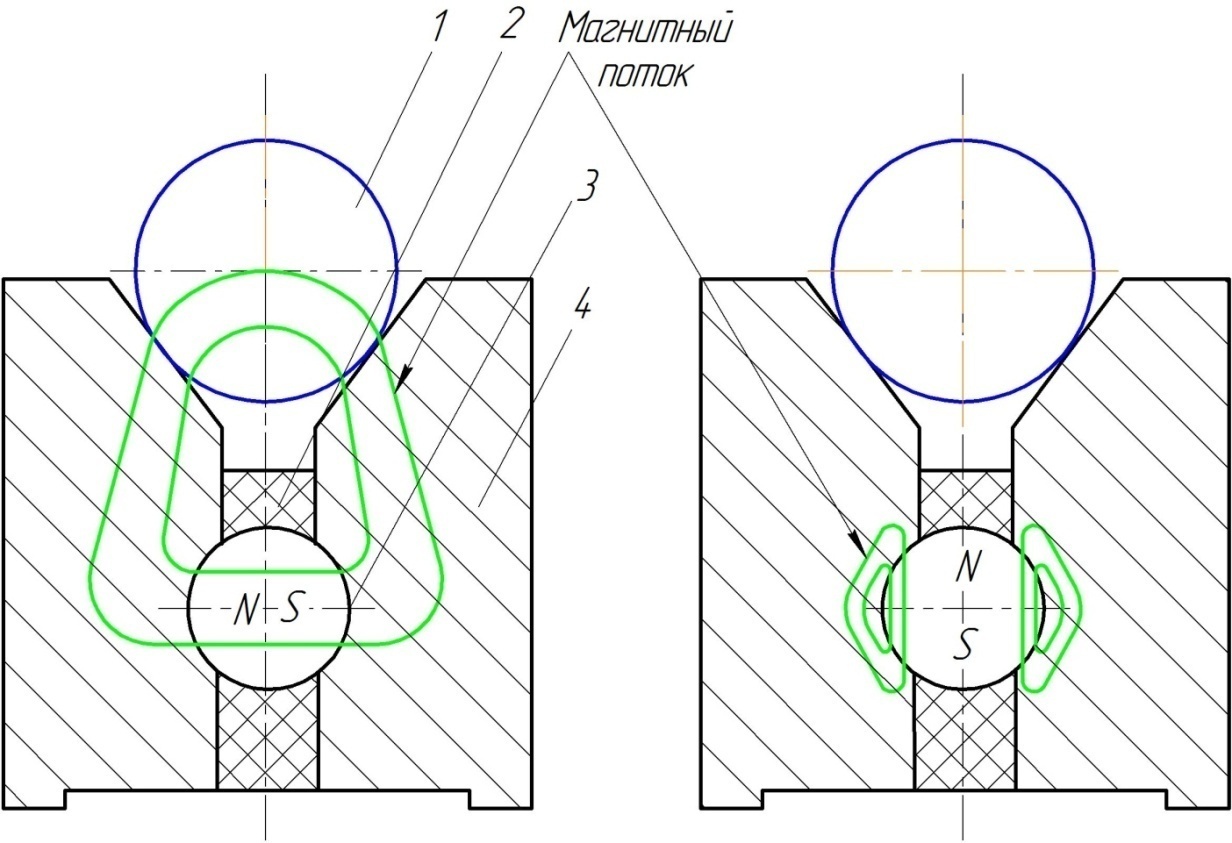
Рис.7.6. Призма с постоянным магнитом
Магнитные и электромагнитные зажимные устройства повышают производительность труда (иногда в 10-15 раз) за счет снижения вспомогательного и основного времени (при многоместной обработке). Они могут многократно использоваться, что сокращает номенклатуру приспособлений и повышает коэффициент оснащенности операций.
Удерживающая удельная сила, развиваемая как электромагнитом, так и магнитными приспособлениями, достигает 1,0 МПа.
Расчет исходного усилия W привода, равного зажимному усилию Q, можно производить по формуле:
где — полезная площадь соприкосновения заготовки с поверхностью приспособлений, мм 2 ;
— удельная сила, развиваемая эл.магнитным или магнитным приводом, Pm=0,35МПа;
— коэффициент, учитывающий потери из-за неплотности прилегания заготовки к приспособлению, λ= 0,9.
Источник
Магнитный привод
В машиностроительной практике все большее распространение получают приспособления, в которых закрепление деталей осуществляется силами магнитного поля.
Магнитные приспособления обладают рядом преимуществ, к которым относятся:
- немеханический способ крепления детали, исключающий приложение сосредоточенной нагрузки;
- равномерное распределение усилия притяжения по всей опорной поверхности;
- высокая жесткость приспособления, обеспечивающая точную обработку;
- широкий доступ к обрабатываемым поверхностям;
- удобный и простой в техническом отношении подвод энергии или полная автономность в действии (в случае применения постоянных магнитов);
- высокая производительность и удобство управления;
- отсутствие сложных дополнительных устройств, обеспечивающих работу приспособлений.
В магнитных приспособлениях используется либо энергия, которую образует электромагнитная катушка (электромагнитные приспособления), либо энергия постоянных магнитов (приспособления с постоянными магнитами) .

Рис. 126. Схемы магнитных приспособлений: а — электромагнитного; б- на постоянных магнитах
На рис. 126 изображены принципиальные схемы этих двух видов приспособлений.
Работу по притяжению детали к зеркалу приспособления осуществляет рабочий поток Фр, составляющий часть полного магнитного потока, образуемого электромагнитными катушками или постоянными магнитами.
Этот поток должен подводиться к рабочему зазору δ по некоторому пути, состоящему из стальных магнито-проводов. Так как магнитный поток непрерывен, то, совершив работу, он должен снова вернуться к источнику энергии, т. е. магнитная цепь, по которой проходит рабочий поток, должна быть замкнутой.
В электромагнитном приспособлении (рис. 126, я) цепь состоит из источника энергии 5, магнитопровода 3, детали 1 и второго магнитопровода 3, Основание приспособления 7 является частью сердечника электромагнитной катушки, которая в данном примере как бы разделена на две части. Чтобы магнитный поток не миновал рабочего зазора, магнитопроводы 3 изолированы от корпуса адаптерной плиты 2 приспособления немагнитной прокладкой 4.
Таков же примерно путь магнитного потока и в приспособлении с постоянными магнитами (рис. 1-26, б): источник энергии постоянный магнит 5 — мапштопро-вод 3 — деталь 1 — магнитопровод 8 — магиитоировод 6 — основание 7 и снова постоянный магнит 5.
Управление электромагнитными приспособлениями достаточно просто — оно осуществляется нажатием кнопки на пульте управления. В управлении магнитными приспособлениями с постоянными магнитами возникают некоторые трудности.
Источник
Электромагнитный привод: типы, назначение, принцип работы

В применении компактных, производительных и функциональных приводных механизмов сегодня заинтересованы практически все сферы деятельности человека от тяжелой промышленности до транспорта и бытового хозяйства. Этим обусловлено и постоянное совершенствование традиционных концепций силовых агрегатов, которые хоть и улучшаются, но не меняют принципиального устройства. К наиболее популярным базовым системам такого типа можно отнести электромагнитный привод, рабочий механизм которого задействуется и в крупноформатном оборудовании, и в мелких технических устройствах.
Назначение привода

Практически во всех целевых объектах применения данный механизм выступает исполнительным органом системы. Другое дело, что характер выполняемой функции и степень ее ответственности в рамках общего рабочего процесса может меняться. Например, в запорной арматуре данный привод отвечает за текущее положение клапана. В частности, за счет его усилия перекрытие принимает положение нормально закрытого или открытого состояния. Такие устройства используют в разных коммуникационных системах, что определяет и принцип срабатывания, и защитные характеристики устройства. В частности, электромагнитный привод дымоудаления входит в инфраструктуру системы пожарной безопасности, конструкционно стыкуясь с вентиляционными каналами. Корпус привода и его ответственные рабочие части должны быть устойчивы к высоким температурам и вредным контактам с термически опасными газами. Что касается команды на исполнение, то обычно срабатывает автоматика при фиксации признаков задымления. Привод в данном случае является техническим средством регуляции потоков дыма и гари.
Более сложная конфигурация применения электромагнитных исполнительных органов имеет место в многоходовых кранах. Это своего рода коллекторные или распределительные системы, сложность управления которыми заключается в одновременном контроле целых групп функциональных узлов. В таких системах используется электромагнитный привод клапана с функцией переключения потоков через патрубки. Поводом для закрытия или открытия канала могут служить определенные величины рабочей среды (давление, температура), интенсивность потока, программные настройки по времени и т.д.
Конструкция и составные части
Центральным рабочим элементом привода является блок соленоида, который образуется полой катушкой и магнитным сердечником. Коммуникационные электромагнитные связи данного компонента с другими деталями обеспечиваются малой внутренней арматурой с управляющими импульсными клапанами. В нормальном состоянии сердечник поддерживается пружиной со штоком, который опирается в седло. Кроме того, типовое устройство электромагнитного привода предусматривает наличие так называемого ручного дублера рабочей части, который берет на себя функции механизма в моменты резких перепадов или полного отсутствия напряжения. Может предусматриваться и дополнительный функционал, обеспечиваемый средствами сигнализации, вспомогательными запирающими элементами и фиксаторами позиции сердечника. Но поскольку одним из преимуществ приводов такого типа является небольшой размер, то в целях оптимизации разработчики стараются исключать чрезмерное насыщение конструкции второстепенными устройствами.
Принцип работы механизма
И в магнитных, и в электромагнитных силовых устройствах роль активной среды выполняет магнитный поток. Для его формирования используется или постоянный магнит, или аналогичное устройство с возможностью точечного подключения или отключения его активности путем изменения электрического сигнала. Исполнительный орган начинает действовать с момента подачи напряжения, когда по контурам соленоида начинает проходить ток. В свою очередь, сердечник по мере наращивания активности магнитного поля начинает свое движение относительно полости катушки индуктивности. Собственно, принцип работы электромагнитного привода как раз и сводится к преобразованию электрической энергии в механическую посредством магнитного поля. И как только напряжение падает, в дело вступают силы упругой пружины, которая возвращает на место сердечник и арматура привода принимает исходное нормальное положение. Также для регуляции отдельных этапов передачи усилия в сложных многоступенчатых приводах могут дополнительно включаться пневмо- или гидроприводы. В частности, они делают возможным первичную генерацию электричества из источников альтернативной энергии (воды, ветра, солнца), что удешевляет рабочий процесс оборудования.

Исполнительные действия электромагнитного привода
Схема движения приводного сердечника и его способности работать в качестве выходного силового узла определяют особенности действий, которые может совершать механизм. Сразу надо отметить, что в большинстве случаев это устройства с однотипными элементарными движениями исполнительной механики, которые редко дополняются вспомогательными техническими функциями. По этому признаку электромагнитный привод разделяется на следующие типы:
- Поворотный. В процессе подачи тока происходит срабатывание силового элемента, который совершает поворот. Такие механизмы используются в шаровых и пробковых кранах, а также в дисковых затворных системах.
- Реверсивный. Помимо основного действия способен обеспечивать смену направлений силового элемента. Чаще встречается в распределительных клапанах.
- Толкающий. Данный электромагнитный привод выполняет толкающее действие, которое также применяется в распределительных и запорных клапанах.
С точки зрения конструкционного решения силовой элемент и сердечник вполне могут быть разными деталями, что повышает надежность и долговечность устройства. Другое дело, что принцип оптимизации требует совмещения нескольких задач в рамках функционала одного технического компонента в целях экономии места и энергетических ресурсов.
Электромагнитная арматура
Исполнительные органы привода могут работать в разных конфигурациях, совершая те или иные действия, требующиеся для эксплуатации конкретной рабочей инфраструктуры. Но в любом случае одной лишь функции сердечника или силового элемента будет недостаточно для оказания достаточного эффекта с точки зрения выполнения конечной задачи за редкими исключениями. В большинстве случаев требуется и переходное звено – своего рода транслятор генерируемой механической энергии от непосредственно приводной механики к целевому устройству. Например, в системе полного привода электромагнитная муфта выступает не просто передатчиком усилия, а двигателем, который жестко соединяет две части вала. В асинхронных механизмах предусматривается даже собственная катушка возбуждения с выраженными полюсами. Ведущая часть таких муфт выполняется по принципам роторной обмотки электродвигателя, что и вовсе наделяет этот элемент функциями преобразователя и транслятора усилия.
В более простых системах с прямым действием задачи трансляции усилия выполняют стандартные шарикоподшипниковые устройства, шарнирные и распределительные агрегаты. Конкретное исполнение и конфигурация действия, а также взаимосвязь с приводной системой реализуется по-разному. Нередко разрабатываются индивидуальные схемы сопряжения компонентов между собой. В той же муфте электромагнитного привода организуется целая инфраструктура с собственным металлическим валом, контактными кольцами, коллекторами и медными брусками. И это не считая параллельного устройства электромагнитных каналов с полюсными наконечниками и контурами направления линий магнитного поля.
Рабочие параметры привода

Одна и та же конструкция с типовой схемой работы может требовать подключения разных мощностей. Также типовые модели приводных систем различаются по силовой нагрузке, виду тока, величине напряжения и т.д. Простейший электромагнитный привод клапана работает от сети на 220 В, но также могут встречаться модели с аналогичной конструкцией, но требующие соединения с трехфазными промышленными сетями на 380 В. Требования к энергетическому питанию определяются размерами устройства и характеристиками работы сердечника. Количество оборотов двигателя, к примеру, напрямую определяет объем потребляемой мощности, а вместе с ней свойства изоляции, обмотки и параметры сопротивления. Если конкретно говорить о промышленной электротехнической инфраструктуре, то в проекте интеграции мощного привода должны быть рассчитаны тяговые усилия, характеристики заземляющего контура, схема реализации предохранительных устройств цепи т.д.
Блочные приводные системы
Наиболее распространенный конструкционный форм-фактор выпуска приводных механизмов на электромагнитном принципе действия – блочный (или агрегатный). Это самостоятельное и отчасти изолированное устройство, которое монтируется на корпусе целевого механизма или также обособленного исполнительного узла. Принципиальное отличие таких систем заключается в том, что их поверхности никак не соприкасаются с полостями переходных силовых звеньев и тем более рабочих элементов исполнительных органов целевого оборудования. По крайней мере, такие контакты не обуславливают необходимости принятия каких-либо мер для защиты обеих конструкций. Блочный тип электромагнитного привода задействуют в тех случаях, когда функциональные узлы требуется изолировать от негативного влияния рабочей среды – например, от рисков коррозийного поражения или температурного воздействия. Для обеспечения механической связки используется такой же изолированный орган арматуры наподобие штока.
Особенности встроенного привода

Разновидность электромагнитных силовых приводов, которые выступают в виде составной части рабочей системы, образуя с ней единую коммуникационную инфраструктуру. Как правило, такие устройства имеют компактные размеры и небольшую массу, что и позволяет их встраивать в самые разные инженерно-технические конструкции без существенного влияния на их функциональные и эргономические характеристики. С другой стороны, оптимизация по размерам и необходимость расширения возможностей для обвязки (прямого подключения к оборудованию) ограничивает создателей в обеспечении высокой степени защищенности таких механизмов. Поэтому продумываются типовые бюджетные изолирующие решения наподобие разделительных герметичных трубок, помогающих защищать чувствительные элементы от агрессивного воздействия рабочей среды. К исключениям можно отнести вакуумные клапаны с электромагнитным приводом в металлическом корпусе, к которому подключаются арматурные узлы из высокопрочного пластика. Но это уже специализированные укрупненные модели, имеющие комплексную защиту от токсичных, термических и механических факторов воздействия.
Сферы применения устройства
С помощью данного привода решаются задачи силового механического обеспечения разного уровня. В наиболее ответственных и сложных системах для управления электромагнитными устройствами применяется бессальниковая арматура, повышающая степень надежности и производительности оборудования. В такой комбинации агрегаты используются в транспортных и коммуникационных трубопроводных сетях, при обслуживании хранилищ с нефтепродуктами, в химической промышленности, на перерабатывающих станциях и комбинатах в разных отраслях производства. Если же говорить о простых устройствах, то в бытовой сфере распространен электромагнитный привод вентилятора приточных и вытяжных систем. Мелкоформатные механизмы также находят свое место в сантехнической арматуре, насосах, компрессорах и т.д.

Заключение
При условии грамотного проектирования структуры приводного механизма, на базе электромагнитных элементов можно получить довольно выгодный источник механического усилия. В наилучших исполнениях такие устройства отличаются высоким техническим ресурсом, стабильностью работы, минимальными объемами энергопотребления и гибкостью с точки зрения совмещения с различными исполнительными механизмами. Что касается характерных слабых мест, то они проявляются в низкой помехоустойчивости, что особенно выражено в работе электромагнитного привода выключателя на высоковольтных линиях электропередач с напряжением от 10 кВ. Такие системы по определению нуждаются в специальной защите от электромагнитных помех. Также, ввиду технико-конструкционной сложности, обусловленной применением в выключателе шарнирно-рычажного механизма с толкателем и удерживающей защелкой, требуется дополнительное подключение защитных электротехнических устройств, исключающих риски короткого замыкания в контурах.
Источник



