
- Электромагнитные тормозные устройства
- Электромеханические тормозные системы
- Применение электромеханических тормозных систем имеет ряд следующих преимуществ:
- Мотор в качестве электромагнитного тормоза
- Преимущества и варианты использования
- Режимы работы
- 1. Режим замыкания
- 2. С внешней нагрузкой
- 3. Рекуперация
Электромагнитные тормозные устройства
В некоторых устройствах, с целью торможения вращающихся элементов машины, применяется электромагнитный дисковый тормоз электродвигателя. Электромагнитное тормозное устройство монтируется прямо в двигателе или на двигателе, и по сути представляет собой вспомогательный двигатель или приводной узел, отвечающий всем требованиям касательно как позиционирования агрегата, так и с точки зрения безопасной его эксплуатации. Он включается пружинами и отпускается с помощью электромагнита.
Данное решение позволяет не только обеспечить безопасное торможение двигателя в случае аварии или позиционировать исполнительный орган машины во время ее функционирования, но и просто сокращает время работы машины во время ее торможения.
Существуют два типа дисковых электромагнитных тормозных устройств: дисковый тормоз переменного тока и дисковый тормоз постоянного тока (в зависимости от формы тока, которым питается данный тормоз). Для варианта тормоза, питаемого постоянным током, вместе с двигателем поставляется также и выпрямитель, при помощи которого постоянный ток получается из переменного, которым питается сам двигатель.
Конструкция тормозного устройства включает в себя: электромагнит, якорь и диск. Электромагнит изготовлен в виде набора катушек, расположенных в специальном корпусе. Якорь служит исполнительным элементом тормоза, и представляет собой антифрикционную поверхность, которая взаимодействует с тормозным диском.

Сам диск, с нанесенным на него фрикционным материалом, перемещается по зубцам втулки на валу двигателя. Когда в катушки тормозного устройства подано напряжение, якорь оттянут, и вал двигателя может свободно вращаться вместе с тормозным диском.
Затормаживание обеспечивается в свободном состоянии, когда пружины нажимают на якорь, и он воздействует на тормозной диск, вызывая тем самым остановку вала.
Тормоза такого типа находят обширное применение в системах с электрическим приводом. На случай аварийного отсутствия питания тормозного устройства, может быть предусмотрена возможность снять тормоз вручную.

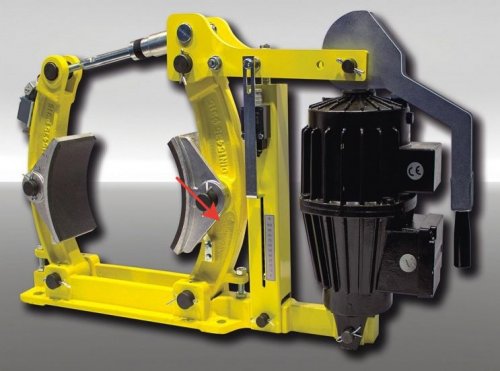
В подъемно-транспортных машинах используется колодочный электромагнитный тормоз (ТКГ), удерживающий вал в заторможенном состоянии когда машина выключена.
ТКП — тормоз постоянного тока серии МП. ТКГ — тормоз электрогидравлический с толкателем серии ТЭ. Электромагнит тормоза ТКГ включает в себя привод и механическую часть, которая в свою очередь включает: подставку, пружины, систему рычагов и тормозные колодки.
Тормозное устройство устанавливается вертикально, причем тормозной шкив имеет горизонтальное положение. Механические части тормозных устройств питаемых переменным или постоянным током для шкивов одного и того же диаметра одинаковы.
Обычно такие устройства имеют буквенное обозначение ТК и число, обозначающее диаметр шкива для торможения. В момент включения питания рычаги нейтрализуют действие пружин и освобождают шкив для обеспечения ему возможности свободного вращения.

Электромагнитные тормоза находят применение в:
блокировке подъемных кранов, лифтов, укладочных машин и т. д. в выключенном состоянии; в механизмах остановки конвейеров, намоточных и ткацких станков, задвижек, прокатного оборудования и т. д.;
для сокращения выбега (времени холостого хода во время остановки) машин;
в системах аварийной остановки эскалаторов, мешалок и т. д.;
для остановки с позиционированием в точном положении в определенный момент времени.
В буровых установках применяется индукционное торможение, основанное на взаимодействии магнитных полей индуктора, в роли которого выступает электромагнит, и якоря, в обмотке которого наводятся токи, магнитные поля которых тормозят «причину их вызывающую» (см. Закон Ленца), создавая тем самым необходимый тормозящий момент ротору.

Рассмотрим это явление на рисунке. Когда в обмотке статора включается ток, его магнитное поле индуцирует вихревой ток в роторе. На вихревой ток в роторе действует сила Ампера, момент которой и является в данном случае тормозящим.
Как известно, в тормозном режиме способны работать асинхронные и синхронные машины переменного тока, а также машины постоянного тока, когда вал движется относительно статора. Если вал неподвижен (относительное перемещение отсутствует), то тормозящего действия не будет.
Таким образом, тормоза на основе электродвигателей применяются для затормаживания движущихся валов, а не для удержания их в состоянии остановки. При этом интенсивность замедления движения механизма можно в таких случаях плавно регулировать, что иногда удобно.
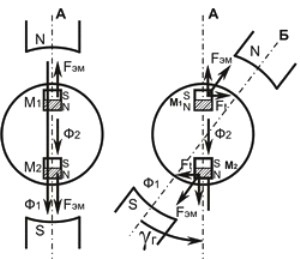
На следующем рисунке приведена схема работы гистерезисного тормоза. Когда в обмотку статора подается ток, на ротор действует вращающий момент, в данном случае он тормозящий, и возникает здесь из-за явления гистерезиса от перемагничивания монолитного ротора.
Физическая причина в том, что намагниченность ротора становится таковой, что его магнитный поток совпадает по направлению с потоком статора. И если ротор попытаться из такого положения повернуть (так чтобы статор оказался относительно ротора в положении Б), то он будет стараться вернуться обратно в положение А за счет тангенциальных составляющих магнитных сил, — так и возникает в данном случае торможение.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Электромеханические тормозные системы
Дальнейшим шагом развития тормозных систем являются электромеханические тормозные системы. Электромеханическая тормозная система состоит из блока управления (процессора) 9, который имеет связь с датчиками и исполнительными механизмами системы, тормозной педали 10 с имитатором чувствительности торможения 7, приводных механизмов колес 5 и 13. В приводных механизмах задних колес вмонтированы механизмы стояночного тормоза, который управляется включателем 11 из салона автомобиля. 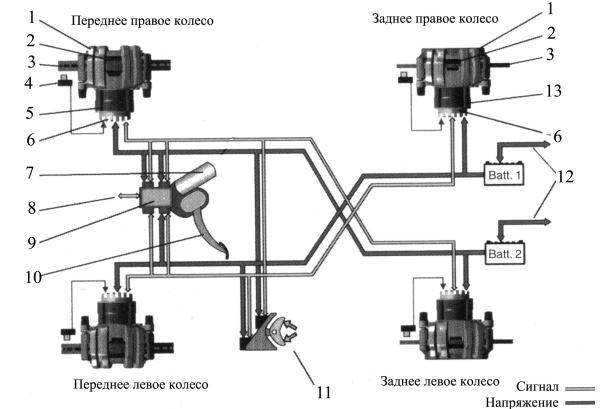
Рис. Электромеханическая тормозная система:
1 – суппорт; 2 – фрикционная накладка; 3 – тормозной диск; 4 – датчик частоты вращения колеса; 5 – приводной механизм; 6 – электрическая колодка; 7 – имитатор чувствительности торможения; 8 – подсоединение бортовой электрической сети; 9 – центральный процессор и контроль АКБ; 10 – тормозная педаль; 11 – включатель стояночной тормозной системы; 12 – бортовая электрическая сеть; 13 – приводной механизм с встроенным механизмом стояночного тормоза
В отличие от гидравлических и электрогидравлических тормозных систем в электромеханических системах тормозная сила воздействует на тормозной диск вместо традиционной скобы. Тормозная система приводится в действие тормозной педалью, которая через потенциометр связана с электронным блоком управления. Сигнал, зависящий от скорости и усилия нажатия на тормозную педаль, передается в блок управления. В нем в зависимости от режима движения и процесса торможения (частота вращения затормаживаемого колеса, уклонение колеса от прямолинейного курса, поперечное ускорение) поступающие сигналы перерабатываются и рассчитываются электрические величины для оптимальной тормозной силы. Рассчитанные электрические величины передаются в приводной механизм колеса для осуществления процесса торможения.
Тормозной механизм колеса показан на рисунке: 
Рис. Тормозной механизм электромеханической тормозной системы:
1 – кулак; 2 – подшипник; 3 – статор; 4 – ходовой винт (шпиндель); 5 – ротор; 6 – сателлитная шестерня; 7 – солнечная шестерня; 8 – тормозной диск; 9 – тормозная колодка
Тормозной механизм представляет собой вмонтированный в привод колеса электродвигатель состоящий из статора 3 и вращающегося ротора 5, установленного на подшипниках. Внутренняя часть ротора является коронной шестерней в зацеплении с которой находятся сателлитные шестерни 6, которые приводят во вращение солнечную шестерню 7. Внутри ротора 5 установлен ходовой винт 4. При подаче тока определенной величины в статор, ротор начинает вращаться и ходовой винт передвигается с разной скоростью, на разную величину перемещения, а также может менять направление движения в зависимости от характера вращения ротора. Ходовой винт, соединенный с колодкой, в зависимости от дорожных условий и характера торможения воздействует на тормозную колодку, прижимая или отводя ее от тормозного диска.
Стояночный тормоз представляет собой дополнительный встроенный механизм в тормозной механизм колеса, который прижимает тормозные колодки к диску при подаче тока на приводной механизм с стояночного тормоза. Управление стояночным тормозом осуществляется от кнопки, с помощью которой замыкается электрическая цепь.
Применение электромеханических тормозных систем имеет ряд следующих преимуществ:
- оптимальное соотношение тормозных сил и стабилизация по устойчивости автомобиля при движении
- оптимальная чувствительность тормозной педали, что уменьшает тормозной и остановочный путь
- бесшумный привод и отсутствие вибраций педали характерной для гидропривода с АБС
- безопасное перемещение педального модуля при ДТП
- отсутствие вакуумного усилителя для привода тормозной системы
Электромеханические тормозные системы могут выполнять функции АБС, систем курсовой устойчивости, противобуксовочных систем и т.д. По сравнению с гидравлическими системами они работают бесшумно, имеют меньшее количество составляющих тормозной системы и более экологичны, ввиду отсутствия в системе тормозной жидкости.
Источник
Мотор в качестве электромагнитного тормоза
Я занимаюсь разработкой бесколлекторных моторов в компании Impulsor. В последнее время к нам часто обращаются для разработки мотора/генератора, который будет выступать в качестве тормоза. В данной статье я расскажу об особенностях такого применения моторов, какие при этом преимущества и недостатки, и как реализовать такой режим работы.

Преимущества и варианты использования
Использование мотора в качестве тормоза даёт ряд преимуществ и параметров, которых не достичь, используя другие, доступные на данный момент, виды тормозов. Однако у данного подхода есть и недостатки.
- Быстрый режим включения/выключения и выставления тормозного момента.
- Широкий диапазон рабочих оборотов. Возможно сделать и сверх оборотистый тормоз ( до 100 000 rpm), так наоборот и очень медленный.
- Плавная установка нагрузки, отсутствие возможности случайной блокировки вала.
- Отсутствие пыли и отработанных материалов от тормоза. Можно использовать в помещении или замкнутом объёме.
- Можно использовать в качестве генератора.
Недостатки:
- Ограничения по рабочей температуре до 150, 200 градусов. Немного поднять температуру возможно, но при этом цена изделия возрастает очень сильно.
- Обычный тормоз из диска и колодок в тех же габаритах будет эффективнее.
- Сильные ограничения по моменту на низких оборотах и невозможность полностью заблокировать вал. Данное ограничение можно обойти с применением контроллера с внешним питанием.
- Постоянное наличие небольшого тормозного момента.
Благодаря своей скорости, точности и чистоте, такой тормоз незаменим в лабораториях и закрытых приборах. Близким аналогом мотора-тормоза, является порошковый тормоз. Он такой же быстрый, не создаёт пыль, но он не может работать на высоких оборотах и большинство существующих моделей и вовсе ограниченны 1500-3000rpm. Обычный дисковый тормоз не способен обеспечить такую же точность и стабильность работы.
Режимы работы
Для электромагнитного тормоза доступны 3 режима торможения, они различаются тем, куда идёт энергия от торможения:
- Режим замыкания и выделения тепла непосредственно в моторе.
- Выделение тепла на внешней нагрузке, сопротивлении или биполярном транзисторе.
- Рекуперация и зарядка аккумулятора.
Далее я подробнее расскажу об этих режимах для моторов синхронного типа с постоянными магнитами BLDC, также это применимо и к обычным DC.
1. Режим замыкания
Это самый простой режим. В нём контакты мотора просто замыкаются, и тормозная мощность выделяется на сопротивлении обмотки мотора. Моторы изначально спроектированы с уклоном на охлаждение и к тому же они обладают достаточно большой массой и теплоёмкостью. Это позволяет достаточно интенсивно использовать такой режим без доработок мотора/генератора.
Для реализации данного режимы достаточно диодного моста и механического (кнопки, рубильника или реле) или электронного ключа (MOSFET, IGBT). Для корректировки тормозного усилия применяется ШИМ, который задаёт скважность открытия ключа. Схема подключения выглядит следующим образом:

Данный режим имеет интересную особенность. С ростом оборотов максимальный тормозной момент будет падать. Это связанно с тем, что обмотка мотора имеет значительную индуктивность и с ростом оборотов, растёт и частота токов. В результате реактивное сопротивление обмотки превысит активное и мощность потерь будет ниже максимально возможной для этого мотора. Характерная зависимость максимального тормозного момента от оборотов показана на графике ниже:
Несмотря на то, что любой готовый мотор можно сразу использовать в таком режиме, такой режим не позволит раскрыть весь потенциал изделия. Однако характеристики работы тормоза в таком режиме можно значительно повысить, есть его изначально проектировать как тормоз.
У этого режима есть ещё один важный недостаток. Из-за быстрого и резкого замыкания и размыкания обмоток будут возникать сильные электромагнитные помехи. Также диодный мост должен быть рассчитан на большие импульсные токи.
2. С внешней нагрузкой
В данном режиме основным источником выделения тепла от торможения служит внешнее сопротивление. Этот режим гораздо более эффективный, так как тормозная мощность более не ограниченна теплоотводом тепла мотора, а радиатор на сопротивлении можно сделать сколь угодно большим. Кроме того, если правильно подстраивать величину сопротивления, то максимальный тормозной момент будет выше, чем просто при замыкании и чем выше обороты, тем существеннее это будет проявляться.
Для реализации данного режима также необходим диодный мост, но после него включается либо механический реостат, либо биполярный транзистор со схемой контроля тока, либо сопротивления (схема электронной нагрузки). Схема подключения выглядит следующим образом:
При малой величине внешнего сопротивления относительно сопротивления мотора, характер тормозного момента будет близок к первому режиму. При увеличении сопротивления точка пикового момента будет смещаться к большим оборотам, и максимальная тормозная мощность будет расти. Динамика изменения тормозного момента с ростом сопротивления нагрузки показана на графике ниже:
Данный режим позволяет получить на нужном диапазоне рабочих оборотов участок, на котором тормозной момент возрастает с ростом оборотов. Этот режим работы крайне удачный, так как он позволяет стабилизировать обороты или ограничить их. Образуется стабильная система с обратной связью.
3. Рекуперация
Данный режим самый сложный в реализации. Он требует контроллера (ESC) наподобие тех, что применяется для управления бесколлекторными моторами BLDC. Но при этом данный режим и самый эффективный. Он способен устранить большинство недостатков тормоза такого типа. Так, например, контроллер позволит полностью блокировать вал мотора, он позволит использовать тормоз одновременно в режиме генерации и контролируемого торможения и в данном режиме можно достигнуть тормозных моментов значительно выше, чем в предыдущих 2х.
В данной статье я не буду подробно описывать устройство контроллера и алгоритмы его работы, т.к. эта тема для отдельной статьи, а возможно и не одной. Для желающих разобраться в данном вопросе можно изучить принцип работы контроллера в электротранспорте (велосипедах, самокатах) и то как в них реализованы алгоритмы торможения и рекуперации.
Источник



