
Гидравлический привод для автомобиля повышенной проходимости для соревнований по «трофи — рейдам»

ГИДРАВЛИЧЕСКИЙ ПРИВОД ДЛЯ АВТОМОБИЛЯ ПОВЫШЕННОЙ ПРОХОДИМОСТИ ДЛЯ СОРЕВНОВАНИЙ ПО «ТРОФИ — РЕЙДАМ»
Научный руководитель – канд. техн. наук
Сибирский Федеральный университет
В настоящее время автоспорт приобретает все большую популярность во всем мире и наша страна не исключение. Ежегодно проводятся различные международные соревнования, в которых наша страна принимает активное участие, например, ралли-марафон «Дакар».
Особый интерес представляет новый вид автоспорта – трофи-рейд, смысл которого в преодолении бездорожья, обычно на полноприводных автомобилях (внедорожниках), специальных внедорожных мотоциклах, квадроциклах. Как правило, в трофи-рейдах, в отличие от автогонок, скорость прохождения маршрута не так важна – необходимо просто уложиться в зачетное время. Важнее успешно пройти все спецучастки и выполнить задания всех соревновательных этапов.
В этой связи в Сибирском федеральном университете был организован центр автомотоспорта, основной целью которого, является интеграция научно-технической деятельности студентов и преподавателей СФУ в научных исследованиях, экспериментальных установках, а также развитии автомотоспорта. В рамках одного из направлений деятельности Центра реализуется проект, целью которого является разработка автомобиля повышенной проходимости в соответствии с требованиями Российской автомобильной федерации (РАФ) для участия в соревнованиях.
В соответствии с требованиями РАФ и проанализированными выше автомобилями, для улучшения показателей проходимости и пассивной безопасности проектируемой машины коллективом Центра автомотоспорта СФУ была разработана пространственная рама, состоящая из труб прямоугольного и квадратного профиля, основным достоинством которой является высокое отношение крутильной жёсткости к массе. АТС с центральным расположением двигателя и гидрообъемной трансмиссией. Общий вид автомобиля представлен на рисунке 1.

Рисунок 1 — Автомобиль СФУ 3111
Трансмиссией называется силовая передача, осуществляющая связь двигателя с ведущими колесами автомобиля. Она служит для передачи от двигателя к ведущим колесам мощности и крутящего момента, необходимых для движения автомобиля.
На данном автомобиле решено реализовать гидрообъемную трансмиссию вместо механической, так как переключение передач приводит к разрыву потока мощности и опасности срыва грунта колесами в момент включения передачи при движении по поверхностям с низкой несущей способностью. Эффективность двигателя в механической трансмиссии высока только на некоторых определенных режимах его работы, например, в режиме создания максимального крутящего момента и резко падает при отходе от них.
Ступенчатая трансмиссия, осуществляя жесткую связь двигателя с колесами, нагружает двигатель моментом, пропорциональным моменту дорожных сопротивлений, которые, в свою очередь, изменяются в широком диапазоне произвольно и независимо от водителя. В результате двигатель используется недостаточно эффективно, и эксплуатационный расход топлива весьма велик. Все эти обстоятельства приводят к выводу о необходимости применения на полноприводных автомобилях бесступенчатых трансмиссий, в нашем случае – гидрообъемной. Для достижения цели при проектировании гидрообъемной трансмиссии перед нами были поставлены следующие задачи: обеспечение полного привода, возможность включения и отключения переднего или заднего мостов для езды по асфальтобетонному покрытию, возможность включения межосевой блокировки, а так же обеспечение реверса (возможность движения задним ходом).
 |
Вначале 1990-х гг., были проведены обширные исследования в области гидрообъемных трансмиссий, и была выдвинута идея для использования «гибкой» трансмиссии в автомобилях эксплуатируемых по бездорожью. Эта идея стала воплощаться в реальность когда в результате реорганизации НАМИ была основана небольшая научно-исследовательская фирма «НАМИ-Сервис. Ее руководителем стал . Результаты исследований позволили к концу 1990-х гг. сформулировать основные требования к конструкции «гибкой» трансмиссии полноприводного автомобиля высокой проходимости и приступить к разработке опытного образца. Так в 2003 году появился уникальный не имеющий аналогов в мире автомобиль под названием «Гидроход-49061» с гидрообъемной трансмиссией. Принципиальная гидравлическая схема трехконтурной гидрообъемной трансмиссии, принятой за основу при проектировании автомобиля «Гидроход» представлена на рисунке 2.
Рисунок 2 — принципиальная гидравлическая схема автомобиля «Гидроход-49061».
Где 1 – двигатель, 2 – раздаточный редуктор, 3 – насос, 4 – гидромотор, 5 – согласующий редуктор, 6 – колесо.
Однако такая схема не может быть использована на легковом автомобиле, из-за габаритов и массы оборудования. Так для автомобиля АТС СФУ 3111 мы предложили схемное решение с одним гидравлическим насосом и двумя гидравлическими моторами, которые приводят в движение мосты, а не отдельно каждое колесо. К тому же использование одного гидронасоса и подключение гидромоторов непосредственно к мостам упрощает схему тем, что можно пренебречь использованием редукторов. Ниже на рисунке 3 представлена гидравлическая схема, используемая на автомобиле.

Рисунок 3 – принципиальная гидравлическая схема автомобиля АТС СФУ 3111.
Гидропривод состоит из бака, гидронасоса Н, фильтра Ф, предохранительного клапана КП, гидрораспределителя Р1 переключение которого обеспечивает реверс хода а так же нейтральное положение замыкающее гидромоторы в одну цепь и освобождая гидронасос от нагрузки, гидрораспределителя Р2 (гидравлическая межосевая блокировка), гидрораспределителей Р3 и Р4 которые позволяют отключать передний или задний мосты и переливных клапанов установленных в сливной гидролинии.
Для достижения межосевой блокировки нами был сконструирован гидрораспределитель Р2 не имеющий аналогов. Уникальность этого гаспределителя в том, что в нем работают две секции одновременно, а при переключении его начинают работать срезу две другие секции, что кардинально меняет работу гидропривода.
Гидравлическая межосевая блокировка (гидрораспределитель Р2) работает следующим образом. При включении левой (по схеме) позиции гидрораспределителя жидкость нагнетающаяся насосом Н попадает в первую и третью полость гидрораспределителя Р2 (смотреть слева по схеме). Таким образом гидромоторы включены параллельно, это позволяет работать гидросистеме даже если один гидромотор заблокируется (например колеса упрутся в бревно), при переключении гидрораспределителя Р2 мы замыкаем гидромоторы в одну цепь (последовательно) это позволяет избежать остановки автомобиля при попадании колес одного из мостов в почву где сила трения о грунт значительно меньше чем у другого. Переливные клапаны служат для слива жидкости при температурном расширении, когда один из мостов отключен.
Источник
DAF представил гидропривод для передней оси: новый или старый?

В компании DAF, невзирая на обстановку, недавно провели презентацию строительных тягачей, где показали новую систему РХР. На деле, правда, эта система — не что иное, как хорошо известный подключаемый гидропривод передних колес под названием HydroDrive.
Устроена эта система следующим образом: в передних ступицах установлены гидромоторы с крутящим моментом до 6435 Нм при максимальном давлении в системе 360 бар. К валу отбора мощности двигателя пристыкован гидронасос, а на раме смонтированы бак с рабочей жидкостью и блок клапанов.
В штатных режимах тягач располагает лишь приводом на заднюю ось, но, если возникает потребность в полном приводе, система включается. Водитель нажимает клавишу, клапаны открываются, масло поступает в гидромоторы — и тягач начинает «грести» не только задними, но и передними колесами. Помимо этого, система активируется и автоматически — если датчики регистрируют скольжение при обычной езде.
Но почему дафовцы представили эту систему как новинку — непонятно. Ведь она известна давным-давно и есть почти у каждого из европейских конкурентов.
Одним из первых подобное решение продемонстрировал на своих тягачах MAN, еще в 2005 году. Чуть позже оно появилось и на Мерседесах. А в 2010-м французы из Renault показали такую же систему в действии на своих машинах, переименовав в OptiTrack. Неудивительно, что через год ее начала предлагать и хозяйская фирма Volvo. Все они были похожи, даже поставщиками агрегатов выступали одни и те же фирмы. В частности, гидромоторы несли чешскую марку Poclain Hydraulics.
Но самое примечательное, что гидропривод передней оси был в программе и у ДАФа. Его, в том числе и для старших тягачей XF, предлагал местный партнер-передельщик Ginaf — под собственным именем HydroAxle+. Но зачем тогда заново демонстрировать его публике под другим названием?
В нем и кроется ответ: РХР расшифровывается как Paul Xtra Power. Эта фирма хорошо известна как производитель нестандартных машин для компании Mercedes. В частности, именно Paul поставляет и собирает такие гидромосты для немецкого гиганта — в значительных количествах.

Хотя в гражданской программе DAF давно нет полноприводных моделей, он авторитетный поставщик таких машин для нидерландской армии — наподобие танкового тягача XF 6×6
Больший тираж позволяет уменьшить цену. Если система фирмы Ginaf оценивается в 18 тысяч евро, то ее аналог у того же МАНа дешевле почти на треть — стоит около 13 тысяч евро. Экономия для покупателя значительная. Пока система РХР будет доступна для тягачей DAF CF и XF, а к концу года появится и ее вариант для шасси.
Источник
Гидропривод транспортного средства 4-Trac
Принципиальная схема гидропривода 4-Trac (привода на все колеса)
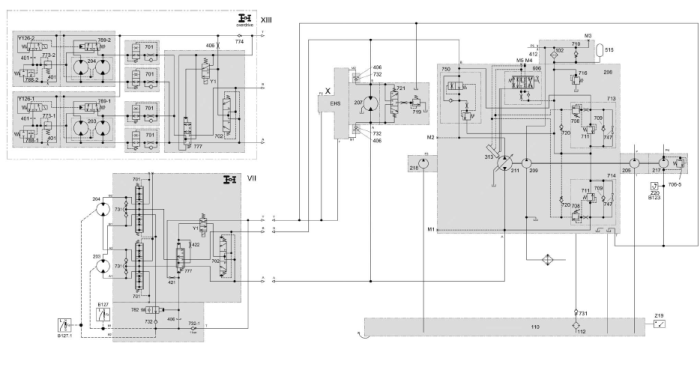
Гидравлическая схема привода
Обозначения:
102 Фильтровальный патрон — 10 мкм
109 Масляный радиатор
110 Масляный бак
112b Сетчатый фильтр привода ходовой части и рулевого управления
203 Привод 4-Trac, радиально-поршневой гидромотор слева
204 Привод 4-Trac, радиально-поршневой гидромотор справа
205 Шестеренчатый насос рабочей гидравлики — 19 или 14 см3/об.
207 Аксиально-поршневой нерегулируемый гидромотор — 100 см3/об.
208 Привод ходовой части, регулируемый гидронасос.. Rexroth 90 R 100/130
209 Питательный насос — 26 см3/об.
211 Аксиально-поршневой регулируемый гидронасос — Rexroth 100 / 130 см3/об.
217 Насос привода корзины радиатора — 5,5 см3/об.
218 Шестеренчатый насос рулевого управления — 11 см3/об.
313 Сервоцилиндр
401 Диафрагма A
406 Диафрагма — Ø 0,8 мм
412 Диафрагма — Ø 2 мм
515 Гидроаккумулятор — 0,75 л
606 Сервоклапан
701 Клапан регулирования потока 4-Trac
706-5 Клапан ограничения давления
708 Клапан отсечки давления — 420+30 бар
709 Питательный клапан — 0,7 бар
710 Байпасный клапан — 3 бар
711 Клапан ограничения высокого давления — 430+30 бар
713 Мультифункциональный клапан назад
714 Мультифункциональный клапан вперед
716 Клапан ограничения давления питания — 30±2,5 бар
719 Промывочный клапан
720 Подпорный клапан — 7 бар
721 Переключающий клапан
731 Клапан обратной линии (обратный клапан)
732 Обратный клапан
747 Клапан короткого замыкания
750 Тормозной дроссельный клапан
751 Внешний питательный клапан (обратный клапан)
773 Регулятор давления
774 Подпорный клапан
777 Главный управляющий клапан Привод 4-Trac (привод на все колеса) вкл./выкл.
788 Привод 4-Trac Overdrive, промывочный клапан
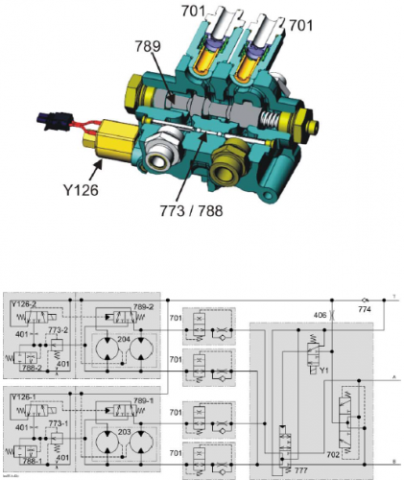
789 Привод 4-Trac Overdrive, подключающий клапан
Y1 Электромагнитный клапан привода на все колеса / 4Trac (управляющий клапан)
Y124 Тормозной дроссель гидравлики ходовой части (HBM)
Y126 Электромагнитный клапан Привод 4-trac Overdrive
Клапанный узел MUD HOG
Описание функций:
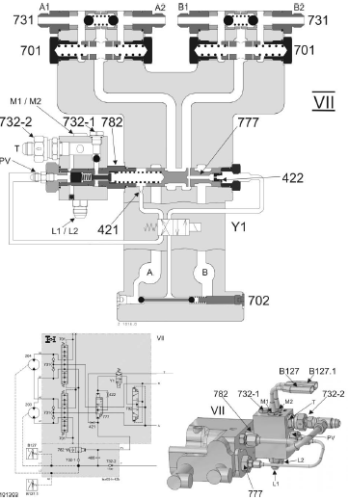
Через соответствующую сторону высокого давления в контуре высокого давления (А/В) производится переключение перекидного клапана (702), так что через соответствующую сторону низкого давления всегда имеется подпиточное давление на электромагнитном клапане (Y1). В зависимости от коммутационного положения электромагнитного клапана (Y1) подпиточное давление подается в зону пружины -ВЫКЛ.- или на противоположную сторону — ВКЛ.- управляющего золотника (777). Управляющий золотник (777) затем открывает поток масла (А/В) через соответствующий клапан регулирования потока (701) к колесным двигателям через выводы А1-А2 или В1-В2. Соответствующая обратная линия колесных двигателей В1-В2 или А1-А2 проходит через клапан обратной линии (731) на другой уровень клапанного узла к стороне низкого давления (В/А).
Клапаны регулирования потока (701) управляют дифференцированным потоком масла к колесным двигателям, с целью предотвращения ухода масла на более легкоходную сторону одного из обоих колесных двигателей. При этом колесный двигатель с большей нагрузкой создает подпорное давление на золотнике регулирования потока, который затем прикрывает кромку управления на противоположной стороне и обеспечивает балансировку уровня давления нагрузки обеих сторон.
Быстродействующий клапан (782)
При выключении привода 4-Track включается также быстродействующий клапан (782) и разгружает при этом напорную сторону двигателей через линия утечек масла в корпус. Небольшой поток масла через диафрагму (406) обеспечивает надежное положение покоя поршней в двигателях, так как обратный клапан (732-2) обеспечивает подпор корпуса двигателя.
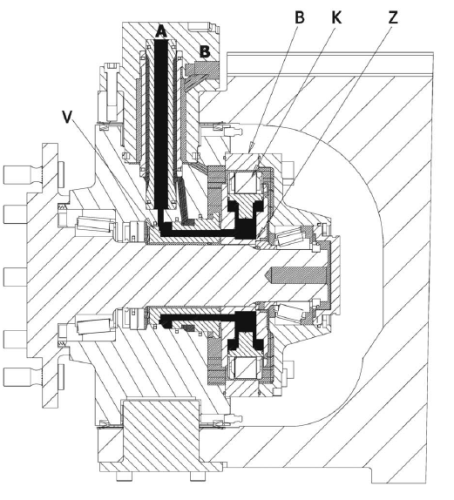
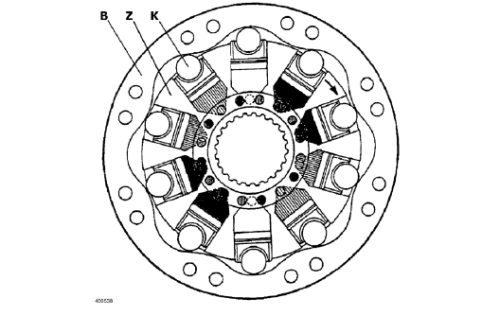
Радиально-поршневой гидромотор POCLAIN
Описание функций:
Колесный двигатель выполнен в виде радиально-поршневого двигателя, при буксировке нет необходимости механически отсоединять его от привода. Если на двигатель передается усилие от ведущего колеса, то криволинейная направляющая (В) вытесняет десять поршней (К) в цилиндрический ротор (Z), благодаря чему колесная ступица может свободно вращаться. При подключенном приводе на все колеса масло подается на вывод А или В двигателя, в зависимости от направления движения. Распределительный блок (V) подает его при этом на поршни (К), находящиеся в ниспадающей позиции криволинейной направляющей (В).
Ролик на поршне (К) вследствие этого отталкивается от криволинейной направляющей (В) и приводит цилиндрический ротор (Z) во вращательное движение, которое через зубчатое зацепление переносится на колесную ступицу. Если поршень (К) перемещается по возрастающему профилю криволинейной направляющей (В), то масло вытесняется на сторону низкого давления контура высокого давления через цилиндрический ротор (Z) и распределительный блок (V).
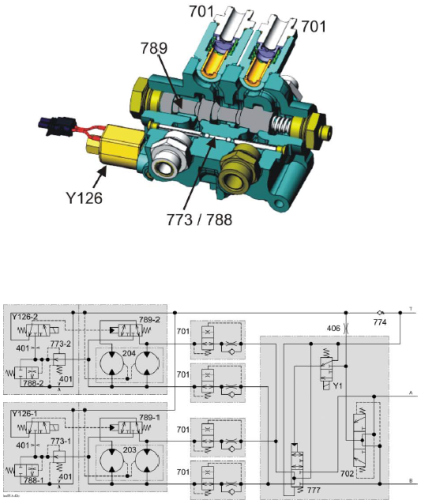
Описание функций:
Для функции 4-Track Overdrive используются 2-ступенчатые радиально-поршневые двигатели. Функция Overdrive ВЫКЛ. Внутри каждого радиально-поршневого двигателя (203/204) два роторных комплекта параллельно соединены друг с другом через подключающий клапан (789). При двойном объеме поглощения скорость движения (скорость вращения) радиально-поршневых двигателей (203/204) снижается при одновременном увеличении передаваемого момента вращения.
Функция Overdrive ВКЛ. При включенном электромагнитном клапане 4-trac Overdrive (Y126) два роторных комплекта соединяются друг с другом последовательно через подключающий клапан (789). При уменьшенном объеме поглощения снижается передающий момент радиально-поршневых двигателей (203/204) при одновременном повышении скорости движения (скорости вращения).
Регулируемый двигатель
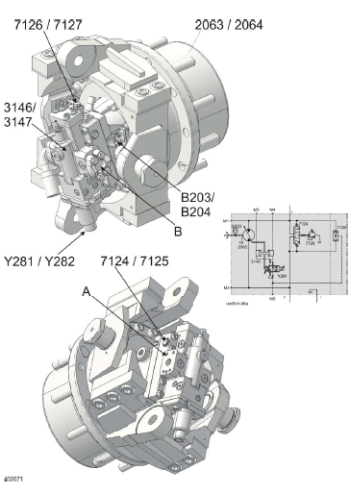
Описание функций: 1/4
Привод на все колеса представляет собой управляемый ведущий мост, каждое колесо которого приводится в действие аксиально-поршневым регулируемым двигателем со встроенным колесным редуктором. Гидравлическое обеспечение выполнено параллельно с гидростатическим замкнутым контуром машины. При возникновении проскальзывания (снижения тяги) на ведущем или управляемом ведущем мосту оно опознается и устраняется регулированием. Также и при затруднительных тяговых условиях система старается обеспечивать максимальную скорость уборки. Система определяет действительную скорость вращения каждого двигателя и на основе соответствующих данных машины (диаметр колеса, механическое передаточное отношение, количество импульсов в минуту и т.д.) рассчитывает окружную скорость колеса.
Эталон — при движении по прямой скорость самого медленного колеса используется в качестве базовой для остальных колес. Принимается, что эта скорость отображает скорость транспортного средства. Регулируемый двигатель быстро вращающегося колеса переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося колеса увеличивается.
Регулирование аксиально- поршневых регулируемых двигателей (2063, 2064)
Регулируемый двигатель при этом находится в своем исходном положении с минимальным объемом поглощения. При помощи электромагнитной катушки с широтно-импульсной модуляцией (Y281, Y282) при этом из соответствующего контура высокого давления через переключающий клапан установочного давления двигателя привода ходовой части (7128, 7129) генерируется переменное давление управления на гидроцилиндр сервоуправления двигателем привода ходовой части (3146, 3147).
LTA ВЫКЛ. Вся система не активна.
В этом случае электромагнитные катушки регулирования аксиально- поршневого двигателя системы 4-Trac (Y281, Y281) обесточены. Регулируемые двигатели системы 4 -Trac (2063, 2064) установлены на минимальный объем поглощения (Qмин. = 0 литров).
При разблокированном выключателе движения по дорогам (S52) и включенной системе 4-Trac (S4) электромагнитные катушки регулирования аксиально-поршневого двигателя системы 281-Trac (Y281, Y281) отдельно управляются с широтно-импульсной модуляцией в зависимости от:
— актуальной скорости
— смещения рычага движения
— соответствующего угла поворота
— направления движения производится регулирование объема поглощения аксиально- поршневых двигателей.
— Скорость Частота, замеренная сенсорами скорости вращения аксиально- поршневых двигателей системы 4-Trac (B203, B204), опознается в качестве скорости вращения (эффект Холла) и вводится в модуль управляемого ведущего моста (A79) в качестве сигнала. При скорости 0 км/час через электромагнитные катушке течет полный ток ок. 1300 мА, двигатели (2063, 2064) полностью выведены (Qмакс. = 50 см3).
— Рычаг движения
Начиная с 50% смещения рычага движения аксиально-поршневые двигатели (2063, 2064) переводятся в направление Qмин.
— Угол поворота рулевого управления
При движении на поворотах скорости колес устанавливаются в пропорциональной зависимости от их круга поворота, то есть воздействие рулевого управления учитывается в процессе регулирования.
Необходимый сигнал, касающийся положения рулевого управления, поступает от сенсора угла поворота колес автопилота (B6 . см. электрооборудование, схему 28) и по шине CAN подается на модуль управляемого ведущего моста (A79). Необходимо соответствующим образом отконфигурировать движение по прямой и размеры шин
Направление движения (Опознавание направления вращения)
Сенсоры скорости вращения системы 4-Trac (B203, B204) дополнительно могут опознавать соответствующее направление движения (направление вращения). При резком замедлении машины благодаря опознаванию направления вращения аксиально- поршневые двигатели переводятся на минимальный объем поглощения (Qмин. = 0 литров), этим предотвращается вращение двигателей в обратную сторону.
Сенсоры скорости вращения системы 4-Trac (B203, B204) работают по принципу сенсора Холла, они благодаря двум сигнальным микросхемам (A/B) могут опознавать полярность магнитного поля. При этом полярность северный полюс соответствует низкому уровню сигнала, а южный полюс — высокому уровню сигнала.
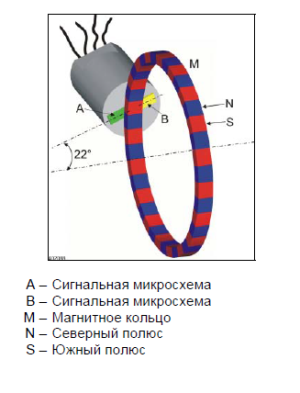 Сигнальные микросхемы установлены со смещением на 22° относительно кольцевой оси и благодаря этому обеспечивают перекрытие, равное ½ от длины полюса. Это означает, что при определенном направлении вращения микросхема A видит один полюс первой, и лишь затем этот же полюс опознается микросхемой B. Генерированные сигналы смещены по фазе на 90°. Правильное положение установки сенсоров скорости вращения системы 4-Trac (B203, B204) задано конструктивным образом.
Сигнальные микросхемы установлены со смещением на 22° относительно кольцевой оси и благодаря этому обеспечивают перекрытие, равное ½ от длины полюса. Это означает, что при определенном направлении вращения микросхема A видит один полюс первой, и лишь затем этот же полюс опознается микросхемой B. Генерированные сигналы смещены по фазе на 90°. Правильное положение установки сенсоров скорости вращения системы 4-Trac (B203, B204) задано конструктивным образом.
Регулирование против проскальзывания слева — справа Различия в скорости вращения опознаются сенсором скорости вращения аксиально-поршневого двигателя системы 4-Trac (B203, B204). Регулируемый двигатель быстро вращающегося колеса переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося колеса увеличивается. впереди сзади. Также и здесь регулируемый двигатель (впереди / сзади) быстро вращающегося моста или колес переводится в направлении небольшого объема поглощения (Qмин.). Передаваемый приводной момент медленно вращающегося моста / колес увеличивается. Коммуникация между модулем привода ходовой части (A49) и модулем управляемого ведущего моста (A79) для опроса скорости вращения выполняется по шине CAN.
Источник



