
Инерционный привод что это такое




6.1. Инерционные приводы
Так называемый гиробус швейцарской фирмы «Эрликон», изготовленный еще до второй мировой войны, приводился в движение только инерционным аккумулятором, который на остановках получал энергию от собственного электродвигателя, питавшегося от контактных стержней, размещенных в местах остановок. Такой автобус был экологически чистым, бесшумным и не требовал создания троллейной сети. Из-за этих качеств он был особенно целесообразен для перевозок пассажиров в курортных городах.
По такому же принципу работает и гиробус, созданный фирмой «Дженерал Электрик» (США) (рис. 32). В отличие от гиробуса фирмы «Эрликон» он имеет более современную конструкцию и снабжен устройством, позволяющим аккумулировать энергию при торможении.
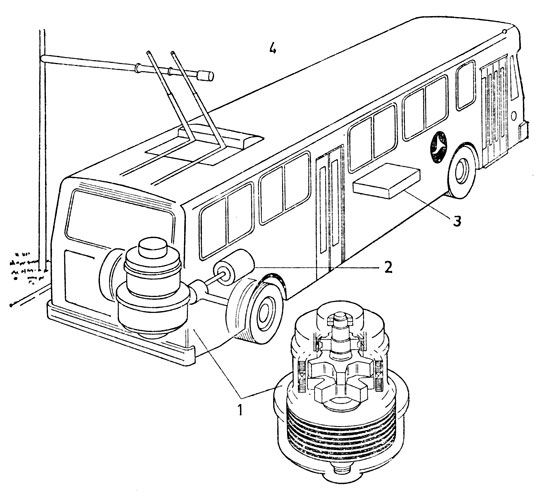
Рис. 32. Инерционный аккумулятор гиробуса фирмы ‘Дженерал Электрик’: 1 — маховик с генератором; 2 — электродвигатель постоянного тока; 3 — электронный переключатель-регулятор; 4 — контактные штанги 5 — для зарядка на остановках
Маховик 1 с электрической машиной, служащей для привода маховика и выработки электрической энергии для тягового электродвигателя, размещен в герметичном корпусе, наполненном водородом. Водород легче воздуха почти в 10 раз, и поэтому при атмосферном давлении он обеспечивает значительное уменьшение потерь на трение в системе «маховик — газ». Поддерживать постоянное небольшое разрежение в корпусе, заполненном водородом, легче, чем при его заполнении воздухом.
Маховик сварен из стальных пластин и имеет максимальную частоту вращения 10 000 мин -1 . Аккумулированная таким способом энергия достаточна для того, чтобы автобус массой 12 700 кг проехал расстояние в 5,6 км. Без отбора мощности на привод вспомогательных агрегатов (отопление, вентиляция, сервоуправление, освещение) можно увеличить запас хода до 11 км. При этом частота вращения маховика упадет до 5000 мин -1 , что гарантирует подъезд к ближайшей станции зарядки аккумулятора. Повторный разгон маховика длится 90 с. Маховик в сборе весит 1500 кг и размещается в задней части автобуса за ведущей задней осью.
Тяговый электродвигатель постоянного тока 2 для раскручивания маховика размещен перед задней осью, а электронное устройство управления 3 — в средней части автобуса непосредственно под полом. Оно предназначено для регулирования частоты вращения маховика при его разгоне, а также для отбора энергии, требуемой для движения автобуса.
В настоящее время испытываются некоторые дополнительные устройства, которые позволяют разгонять маховик не только на остановках, но и при движении. Для этого короткий участок пути снабжается троллейным проводом, и при соединении с ним контактных штанг 4 автобуса вращение маховика может быть ускорено во время движения. В этом случае устраняется зависимость транспортного средства от размещения станций, и оно может проехать практически любое расстояние в пределах оборудованного пути без остановки.
При приводе автомобиля от маховика или при разгоне последнего необходима плавно регулируемая (бесступенчатая) трансмиссия. Например, при использовании энергии маховика его частота вращения постепенно уменьшается и для поддержания постоянной скорости движения транспортного средства передаточное число трансмиссии между маховиком и ведущим мостом должно также плавно уменьшаться. При разгоне маховика в период торможения автомобиля необходимо обеспечивать противоположный процесс. В случае использования электропривода с генератором переменного тока необходимо плавное изменение электрической частоты. Регулятор, требующийся для этого, сложен, имеет большие габариты и по этой причине использование такого устройства в легковых автомобилях невыгодно.
Для плавного изменения частоты вращения применяется и гидростатическая передача, принципиальная схема которой включает в себя насос с бесступенчатым изменением объема и гидродвигатель. Подробное описание такого устройства будет приведено в главе о трансмиссиях.
Источник
Инерционный привод
К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ
Республик ()984796 (61) Дополнительное к авт. свид-ву № 837737 (22) Заявлено 26.01.81 (21) 3238946/25-08 с присоединением заявки №вЂ” (23) Приоритет—
Опубликовано 30.12.82. Бюллетень № 48 (51) M. Кл.з
СССР (53) УДК 62.1.229..382 (088.8) по делам нзооретеннй и открытий
Дата опубликования описания 05.01.83 (72) Автор изобретения
С. Н. Скорынин (7I ) Заявитель (54) ИНЕРЦИОННЫЙ ПРИВОД
Изобретение относится к механической обработке материалов, а именно к инерционным приводам для зажимных устройств металлорежущих станков.
По основному авт. св. № 837737 известен инерционный привод, используемый для зажимных устройств металлорежущих станков. Этот привод содержит оправку с отверстием, гайку и инерционный маховик, кинематически связанные с оправкой, а также резьбовую втулку, контактирующую с гайкой и установленную с возможностью осевого перемещения относительно оправки, при этом в инерционном маховике выполнена кольцевая полость, которая не более, чем на 1/2 своего объема заполнена подвижной инерционной массой, а внутренние торцовые поверхности маховика и гайки оснащены выступами, причем маховик и гайка установлены с возможностью относительного поворота (1) .
Однако известное устройство характеризуется недостаточным усилием развиваемым приводом вследствие малой эффективности использования энергии инерционных масс.
Цель изобретения — повышение надежности крепления детали.
Поставленная цель достигается тем, что в кольцевой полости маховика выполнены цилиндрические перемычки,- равномерно расположенные по окружности и предназначенные для взаимодействия с подвижной инерционной массой.
На фиг. 1 изображен продольный разрез инерционного привода; на фиг. 2 — разо рез А А на фиг
На оправке 1, имеющей. центральное отверстие размещен инерционный маховик 2, смонтированный на подшипнике 3. В центральном отверстии маховика 2 размещена гайка 4, в которой установлена резьбовая
Инерционный маховик 2 имеет кольцевую полость 6. Часть объема полости 6 заполнена подвижной инерционной массой 7 в виде, 20 например, сыпучего материала, создающего смещение центра тяжести маховика 2. Количество подвижной инерционной массы 7 должно быть не более половины объема полости 6 для создания максимального смещения центра тяжести маховика.
Резьбовая втулка 5 имеет резьбовое отис и-гис 8, а также шлицы 9, контактируюIliIic с cоответствующими пазами 10 оправ1.
1 айка 4 смонтирована в маховике 2 с возя::>кностью ограниченного поворота в прслс гах угла между выступами 11, выпол>к ii!;i„мп ii;i гайке 4, и выступами 12, размепцппыми на маховике 2, на оправке 1 вын л..с:э торец 13.
Ь кольцевой полости 6 маховика 2 . : эл >сны цliлиндрические перемычки 14, раьчюмерно расположенные по окружности, vðè::cì некоторая часть цилиндрических
Ill. рсмычск 14 при отсутствии вращения ма озпка 2 находится H среде подвижной инерциопш>й массы 7, раслюложенной в нижней
Усз ройство работает следующим образом
Цпра вка 1 жег тко устанавливается в .:;ппндсль станка, а резьбовое отверстие 8
:. . у. >кн 5 соединяется с приспособлением ,.я закрсnëcnèÿ обрабатываемой детали.
Прн вращении оправки 1 инерционная м;:,;са маховика 2 совместно с подвижной и порционной массой 7, создающей дисбаланс маховика 2 и взаимодействующей с пчлп щричсскими перемычками 14, стремится затормозить вращение гайки 4.
Втулка 5, вращаясь совместно с оправкой 1, ввинчивается в резьбу гайки 4. Перемеща;icь вдоль оправки 1, например в сторону !
«р«п 13, втулка 5 создает тянущее усилие, которос псрсдается приспособлению для закрепления детали посредством резьбового () «всрстия 8.
1!осле зажима обрабатываемой детали пли псрсмещении втулки 5 до упора в тоpci; 13, гайка 4, вследствие взаимодействия высту>юв 11 с выступами 12, начинает вра. цать маховик 2, а подвижная инерционная масса 7 равномерно распределяется
lIo по;нтсти 6 маховика 2 концентрично к оси вращсния, устраняя его дисбаланс. После мого все элементы привода вращаются со скороеThlo вращения шпинделя станка.
При остановке оправки 1 инерционная масса маховика 2 и подвижная инерционная масса 7 препятствуют остановке гайки 4, тем самым обеспечивая вывинчивание втулки 5 из гайки 4 и перемещение втулки 5 вдоль оси вращения в сторону приспособления для закрепления деталей с передачей ему не тянущего, а толкающего усилия.
Вследствие того, что все цилиндрические перемычки 14 являются элементами !
О маховика 2, препятствующими свободному перемещению подвижной инерционной массы 7, создается более жесткая кинематическая связь между маховиком 2 и подвижной инерционной массой 7. В результате этого воздействие инерционной массы 7 на маховик 2 будет наиболее активным, а разность между усилием, препятствующим вращению маховика 2 при вращающейся oiiравке 1, и силой трения в резьбе гайки 4 и оправки 1 будет достаточной для выполнения полезной работы даже в начальный момент вращения оправки 1 или после ее остановки, но при вращающемся маховике 2.
Такое выполнение привода позволит улучшить его работоспособность, повысить развиваемое приводом усилие, без увеличения габаритов устройства, а также повысить надежность крепления детали.
Инерционный привод по авт. св.
¹ 837737, отлина>ощийся тем, что, с целью повышения надежности крепления детали, в кольцевой полости маховика выпол35 иены цилиндрические перемычки, равномерно расположенные по окружности и предназначенные для взаимодействия с подвижной инерционной массой.
Источники информации, принятые во внимание при экспертизе
l. Авторское свидетельство СССР № 837737, кл. В 23 Q 3/00, 1979.
Редактор А. Власенко Техред И. Верес Ко екто И. Ватрушкина
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж вЂ” 35, Раушская наб., д. 4/5
Филиал ППП «Патент», r. Ужгород, ул. Проектная, 4
Источник
Инерционный привод

Владельцы патента RU 2507414:
Изобретение относится к области машиностроения, в частности к инерционным приводам, использующим кинетическую энергию вращающегося маховика. Инерционный привод состоит из герметичного корпуса. В корпусе размещен маховик. Маховик через выходной вал кинематически связан через обгонную муфту с двигателем. Инерционный привод содержит кинематическую связь выходного вала с раздаточной шестерней реверса. Эта шестерня взаимодействует с двумя нормально разомкнутыми управляемыми муфтами сцепления. Эти муфты попеременно кинематически связывают выходной вал с передачей прямого хода и передачей обратного хода. Техническим результатом является создание привода, обеспечивающего передачу значительных крутящих моментов в разных направлениях вращения вала привода, и повышение надежности системы раскрутки маховика. 2 з.п.ф-лы, 1 ил.
Изобретение относится к области машиностроения, в частности к инерционным приводам, использующим кинетическую энергию вращающегося маховика. Известен инерционный привод, состоящий из маховика, расположенного в герметическом корпусе и механизма реверса, состоящего из рычагов, обгонных муфт и роликов по авторскому свидетельству 605051 конструкция реверса сложна и может передавать сравнительно небольшие моменты.
Целью изобретения является создание привода, обеспечивающего передачу значительных крутящих моментов в разных направлениях вращения вала привода и повышение надежности системы раскрутки маховика. Указанная цель достигается наличием кинематической связи выходного вала с раздаточной шестерней реверса, взаимодействующий с двумя нормально разомкнутыми управляемыми муфтами сцепления, попеременно кинематически связывающими его с передачей прямого хода и передачей обратного хода. Передача прямого хода и передача обратного хода являются понижающими, причем передача обратного хода имеет передаточное отношение, меньшее по абсолютному значению, что связано с падением частоты вращения маховика вследствие затрат кинетической энергии при прямом ходе и частично позволяет компенсировать падение частоты вращения выходного вала привода. Кроме того, маховик приводится во вращение двумя или более двигателями, взаимодействующими одновременно с выходным валом маховика, а для синхронизации передача вращения от двигателей к маховику производится через обгонные муфты.
Сущность изобретения и возможность достижения технического результата поясняется схемой, изображенной на фиг.1. Инерционный привод включает в себя: 1 — двигатель, 2 — обгонная муфта, 3 — шестерня обгонной муфты, 4 — шестерня выходного вала маховика, 5 — выходной вал маховика, 6 -планетарная передача, 7 — уплотнение, 8 — герметичный корпус, 9 — маховик, 10 -раздаточная шестерня реверса, 11 — муфта сцепления прямого хода, 12 — передача прямого хода, 13 — муфта сцепления обратного хода, 14 — передача обратного хода, 15 — выходной вал привода.
Работа инерционного привода
Инерционный привод работает в двух режимах: режим накопления энергии и рабочий режим.
В режиме накопления энергии два или более двигателей 1 посредством обгонных муфт 2 и шестерен обгонных муфт 3 через шестерню выходного вала 4 вращает выходной вал маховика 5, который через планетарную передачу 6, работающую в данном случае как мультипликатор, приводит во вращение маховик 9, находящийся в герметичном корпусе 8. Герметичность обеспечивается уплотнением 7. В герметичном корпусе 8 поддерживается вакуум с целью уменьшения потерь кинетической энергии на трение о воздух при вращении маховика 9 на больших скоростях. Муфта сцепления прямого хода 11 и муфта сцепления обратного хода 13 выключены, выходной вал привода 15 неподвижен.
В рабочем режиме при отключенных двигателях 1 маховик 9 через планетарную передачу 6, работающую в данном случае как редуктор, посредством выходного вала маховика 5 передает вращение на раздаточную шестерню реверса 10. При прямом ходе включается муфта сцепления прямого хода 11 и вращение от раздаточной шестерни реверса 10 передается через передачу прямого хода 12 на выходной вал привода 15, а муфта сцепления обратного хода 13 выключена. При обратном ходе включается муфта сцепления обратного хода 13 и вращение от раздаточной шестерни реверса 10 передается через передачу обратного хода 14 на выходной вал привода 15, а муфта сцепления прямого хода 11 выключена.
Авторское свидетельство 605051
1. Инерционный привод, состоящий из герметичного корпуса с размещенным в нем маховиком, который через выходной вал кинематически связан через обгонную муфту с двигателем, отличающийся наличием кинематической связи выходного вала с раздаточной шестерней реверса, взаимодействующий с двумя нормально разомкнутыми управляемыми муфтами сцепления, попеременно кинематически связывающими его с передачей прямого хода и передачей обратного хода.
2. Инерционный привод по п.1, отличающийся использованием для привода маховика двух или более двигателей, которые через обгонные муфты с шестернями взаимодействуют с шестерней выходного вала.
3. Инерционный привод по п.1, отличающийся тем, что передача прямого хода и передача обратного хода являются понижающими, причем передача обратного хода имеет передаточное отношение, меньшее по абсолютному значению.
Источник



