
Устройство автомобилей
Комбинированный привод тормозов
Комбинированным (смешанным) называется привод, в работе которого используется сочетание двух или даже нескольких типов приводов, например, гидравлического с пневматическим, электрического с пневматическим или электрического, гидравлического и пневматического. Из-за сложности конструкции и, как следствие, относительной дороговизны, такие приводы применяются только в случае крайней необходимости, поэтому в массовом автомобильном производстве они встречаются не часто.
Особенности конструкций комбинированного привода тормозных механизмов рассмотрим на примере пневмогидравлического (или гидропневматического) и электропневматического приводов.
Пневмогидравлический тормозной привод
Пневмогидравлический (или гидропневматический) привод является наиболее распространенным типом комбинированных приводов, в работе которых используется два рабочих тела – сжатый воздух и жидкость. Комбинация положительных свойств гидравлического и пневматического привода позволяет в этом случае повысить общую эффективность тормозной системы автотранспортных средств.
Пневмогидравлический привод имеет пневматический источник энергии в виде сжатого воздуха, а непосредственная передача усилия к тормозным колодкам осуществляется тормозной жидкостью под давлением. Такой тип привода позволяет создавать большое давление в гидравлической части привода, увеличивая, таким образом, мускульное усилие водителя на тормозную педаль.
Пневмогидравлический привод, в отличие от «чистого» пневматического привода, срабатывает значительно быстрее, т. е. отличается быстродействием, создавая при этом значительные тормозящие моменты на колесах. Время срабатывания пневмогидравлического привода примерно в полтора-три раза меньше, чем время срабатывания пневматического привода.
Но, как говорится, нет добра без худа. Пневмогидравлический привод существенно сложнее по конструкции, чем гидравлический или пневматический приводы, следовательно менее технологичен в производстве, дороже, а также требует больше затрат на техническое обслуживание в процессе эксплуатации.
Кроме того, пневмогидравлический привод «унаследовал» от гидравлического привода высокую чувствительность к попаданию воздуха в гидравлическую часть системы.
Эти негативные факторы в настоящее время сдерживают широкое применение пневмогидравлического привода в тормозных системах автомобилей.
Конструктивно пневмогидравлические приводы могут выполняться по различным схемам и иметь разную комбинацию использующихся устройств и приборов. Общее устройство пневмогидравлического привода рассмотрим на примере тормозной системы автомобиля Урал-4320, схема которого изображена на рис. 1.
Тормозной привод автомобиля Урал-4320 состоит из двух гидравлических контуров и одного пневматического контура. Первый гидравлический контур приводит в действие тормозные механизмы переднего и среднего мостов, второй – тормозные механизмы заднего моста.

Главной отличительной особенностью этого привода является наличие в нем пневмогидравлических аппаратов (рис. 2), которые иногда называют пневмоусилителями. Однако усилитель всегда устанавливается параллельно основному приводу (например, вакуумный усилитель в гидроприводе тормозов, гидравлический усилитель в рулевом управлении и т. п.), а пневмогидравлический аппарат в приводе тормозной системы рассматриваемого автомобиля установлен последовательно, являясь связующим звеном между гидравлической и пневматической частью тормозного привода. И если в случае с вакуумным усилителем (или усилителем руля) тормозная система (или рулевое управление) работать будет даже при отказе усилителя, хоть и менее эффективно, то в случае отказа пневмогидравлического аппарата тормозная система полностью теряет работоспособность.
В пневмогидравлическом аппарате происходит преобразование сравнительно невысокого давления воздуха (0,6…0,75 МПа) в относительно большое давление тормозной жидкости (10…15 МПа). Увеличение давления происходит вследствие значительной разности рабочих площадей поршней пневматической и гидравлической частей пневмогидравлического аппарата.
Пневмогидравлический аппарат состоит из двух пневматических цилиндров с промежуточной вставкой 4, внутри которой помещены пневматические поршни 3 и 6 на общем штоке 7 с возвратной пружиной, гидравлического цилиндра 11 с бачком 1 для тормозной жидкости, имеющего традиционную конструкцию.
Наличие двух пневматических поршней позволяет получить необходимое давление в гидравлической части привода при сравнительно небольших габаритах пневмогидравлического аппарата.
При нажатии на педаль тормоза воздух через тормозной кран поступает по трубопроводу под задний поршень 6. К другому поршню воздух поступает по каналу и радиальным отверстиям 10 в штоке 7. Под давлением воздуха шток с поршнями перемещается и через толкатель действует на поршень главного гидравлического цилиндра 11, который вытесняет тормозную жидкость в тормозную магистраль.

При растормаживании воздух из пневмоцилиндров через тормозной кран выходит в окружающую среду. Поршни главного гидравлического цилиндра и пневмоцилиндров под действием пружин возвращаются в исходное положение.
В случае разгерметизации гидравлического контура или увеличении зазора в тормозных механизмах ход штока 7 при нажатии на тормозную педаль увеличится, что приведет к механическому замыканию контактов выключателя 12. Загоревшаяся на щитке приборов лампочка будет сигнализировать о неисправности системы.
Наряду с пневмогидравлическим приводом в настоящее время получают распространение тормозные системы с электрогидравлическим и электропневматическим приводом, которые обладают еще большим быстродействием.
Электропневматический привод тормозов
Электропневматический привод приобретает все большее распространение на длиннобазовых автомобилях в автопоездах в связи с необходимостью уменьшения времени срабатывания тормозного привода и улучшения согласованности работы тормозной системы тягача с тормозной системой прицепного транспортного средства.
Наряду с очевидными функциональными преимуществами отсутствие в пневматической линии привода многих традиционных приборов вызывает проблему обеспечения кинематического слежения, а также распределения тормозных сил между мостами. Поэтому для выполнения ключевых задач при управлении рабочими тормозными системами в электрическую часть комбинированного привода вводятся электронные блоки.
Принципиальная схема электропневматического привода рабочей тормозной системы с электронным управлением представлена на рис. 3.
Тормозная педаль 1 устанавливается на оси, связанной с потенциометром. При нажатии на педаль электронные блоки управления (ЭБУ) подают питание на электрические клапаны модуляторов 3 и 8 автомобиля и прицепа, которые сообщают ресиверы с тормозными камерами 2 и 5 автомобиля и 9 прицепа. Давление в тормозных камерах устанавливается пропорционально перемещению тормозной педали, т. е. сигналу, поступающему в электронные блоки от потенциометра, связанного с педалью тормоза.

При неизменном положении тормозной педали 1 давление в тормозных камерах 2, 5, 9 остается постоянным, так как клапаны модулятора 3 и 8 в этом случае закрыты. Закрытие клапанов происходит по команде блоков управления при равенстве сигналов от потенциометра педали и датчиков 6, 10 давления в контурах пневмопривода.
Регулирование тормозных сил между мостами происходит также под управлением электронных блоков в зависимости от сигналов датчиков 7, 11 нагрузки на каждую ось. В случае выхода из строя электрической цепи автопоезд может быть остановлен с помощью ручного крана 4.
Источник
3.5. Комбинированный привод
Стремление максимально использовать достоинства отдельных типов приводов привело к разработке и применению в промышленных роботах комбинированных приводов. Чаще всего в промышленных роботах применяют комбинацию пневматического и гидравлического приводов.
Если в качестве исполнительного двигателя используют гидродвигатель, а пневмосистему применяют для создания необходимого давления, что позволяет отказаться от гидронасосной станции, то привод называют гидропневматическим. Схема гидропневматического привода приведена на рис. 3.11.
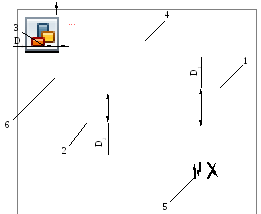
Рис.3.11. Схема гидропневматического привода
Давление воздуха используют в качестве источника энергии, а гидропривод обеспечивает необходимое усилие на исполнительном звене. Такие приводы применены на вертикальных степенях подвижности промышленных роботов «Аутохенд», ПР-10, «Циклон-ЗБ».
В гидропневматическом приводе при подаче воздуха под давлением р через пневмораспределитель 5 в поршневую полость пневмоцилиндра 1 создается давлениер2в поршневой полости промежуточного гидроцилиндра 2, которое передается в исполнительный гидроцилиндр 3, обеспечивающий соответствующее движение исполнительного устройства ПР. При движении поршня пневмоцилиндра 1 в обратном направлении жидкость из штоковой полости гидроцилиндра 2 поступает в штоковую полость гидроцилиндра 3, вызывая обратный ход. Емкость 4 служит для компенсации разности объема штоковой и поршневой полостей цилиндра 2, а также утечки жидкости. Обратный клапан 6 предотвращает попадание жидкости в штоковую полость при прямом ходе гидроцилиндра 2.
Давление жидкости в поршневых полостях гидроцилиндров 2 и 3 при прямом ходе:
Усилие на штоке исполнительного гидроцилиндра 3:
где: р — давление в поршневой полости пневмоцилиндра 1;DI, D2, D3 — диаметры поршней пневмоцилиндра 1, гидроцилиндров 2 и 3 соответственно;К =D 2 1 /D 2 2— коэффициент усиления. Обычно принимаютК=2. 3.
Если в качестве исполнительного двигателя используют пневмоцилиндр, а гидроцилиндр обеспечивает коррекцию скорости выходного звена, то привод называют пневмогидравлическим. На рис. 3.12. показана схема комбинированного пневмогидравлического привода.
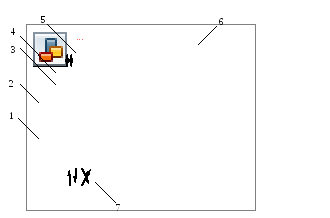
Рис. 3.12. Схема комбинированного пневмогидравлического привода
Воздух поступая под давлением из магистрали через пневмораспределитель 7 в поршневую полость пневмоцилиндра 1, перемещает поршень со штоком, скорость которого определяется настройкой гидродросселей 3. При этом гидрораспределитель 5 соединяет обе полости гидроцилиндра 2. Обратные клапаны 4 обеспечивают свободный доступ жидкости в заполненную полость гидроцилиндра 2. Для компенсации разности объемов штоковой и поршневой полостей гидроцилиндра и пополнения утечек масла в схеме предусмотрен масляный аккумулятор 6. В начальный момент времени при подаче воздуха в поршневую полость пневмоцилиндра, гидрораспределитель находится в крайнем левом положении, обеспечивая свободное перетекание жидкости в полостях гидроцилиндра 2. При достижении пневмоцилиндром 1 заданного положения срабатывает гидрораспределитель 5, прекращая движение жидкости в полостях гидроцилиндра 2, обеспечивая жесткую фиксацию положения штока пневмоцилиндра 1.
Применяют также комбинированные гидроэлектрические приводы, в которых последовательно соединены маломощный электрический и выходной гидравлический приводы. Электропривод преобразует входной электрический сигнал в перемещение, которое служит входным воздействием для гидроусилителя гидропривода.
Существуют аналогичные комбинированные пневмоэлектрические приводы, в которых вместо выходного гидропривода применен пневмопривод.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.
Источник
Комбинированный привод что это такое
Стремление к использованию преимуществ различных видов приводов с объединением их в единой системе, а также попытка компенсировать присущие им недостатки привели к разработке и применению в роботах комбинированных приводов. Чаще всего сочетают пневматический с гидравлическим приводы, а также электрический с гидравлическим.
Комбинированный пневмогидравлический привод модуля движения «руки» робота, обеспечивая функционирование модуля на основе дешевого пневмопривода, позволяет в то же время осуществлять коррекцию скорости выходного исполнительного звена и его конечного положения с помощью параллельно подключенного гидроцилиндра Таким образом привод приобретает признаки следящего. Воздух поступает под давлением через пневмораспределитель 1 в одну из полостей рабочего пневмоцилиндра 2, обеспечивая перемещение штока 3 с рабочим органом 4. Поскольку шток пневмоцилиндра связан перемычкой 5 со штоком 6 корректирующего гидроцилиндра 7, то скорость исполнительного звена определяется настройкой дросселей 8 гидроцилиндра, регулирующих перетекание рабочей жидкости через его полости. При этом обратные клапаны 9 обеспечивают беспрепятственный доступ рабочей жидкости в обе полости гидроцилиндра Для компенсации разности объемов полостей гидроцилиндра и подпитки гидросистемы в случае утечек масла предусмотрен пневмогидравлический аккумулятор 10. Гидрораспределитель 11 может выполнять роль гидрозамка, фиксирующего положение рабочего органа при остановке. Если в этой схеме применить дроссели с пропорциональным электрическим управлением, то при наличии обратной связи по положению такой привод можно использовать в промышленных роботах с позиционным управлением.
Применение гидропневматического привода, показанного на 7.16, позволяет отказаться от дорогостоящей гидронасосной станции. При подаче воздуха под давлением через пневмораспреде- литель 1 в поршневую полость пневмоцилиндра 2, благодаря общему штоку 3 в поршневой полости гидроцилиндра 4, также создается давление, и рабочая жидкость поступает под давлением в исполнительный гидроцилиндр 5, перемещая шток 6 с рабочим органом 7. При движении поршня пневмоцилиндра в обратном направлении соответственно изменяется направление движения поршней в гидро- цилиндрах, а значит, — и рабочего органа Для компенсации разности объемов штоковой и поршневой полостей гидроцилиндра, а также для подпитки гидросистемы при утечке жидкости предусмотрен пневмогидроаккумулятор 8.
Широкое применение в робототехнике находят комбинированные электрогидравлические приводы, в которых последовательно соединены электрический и выходной гидравлический приводы. Электропривод небольшой мощности преобразует управляющий электрический сигнал в перемещение, которое служит входным воздействием для гидроусилителя гидравлического привода, непосредственно обеспечивающего соответствующие рабочие движения исполнительных органов робота Такой привод может строиться как замкнутый следящий и применяться в роботах с позиционным и контурным управлением.
В последние годы для манипулирования миниатюрными изделиями стал использоваться своеобразный вид привода — вибрационный, основанный на применении высокочастотных пьезоэлектрических двигателей. Действие таких вибродвигателей основано на преобразовании высокочастотных многокомпонентных упругих колебаний твердых и гибких тел в направленное многомерное вращательное или поступательное движение подвижного звена — ротора, ползуна, штока и т.п. В отличие от известных низкочастотных механизмов для преобразования колебательного движения в линейное или вращательное перемещения в вибродвигателях используются упругие колебания в виде стоячих или бегущих волн с высокой частотой преобразуемых колебаний в ультразвуковом диапазоне (от 20 кГц до 5 МГц и более) и весьма малой амплитудой — от 0,1 для тихоходных до 10-100 мкм для быстроходных устройств.
Главной компонентой вибрационного двигателя является вибропреобразователь, обеспечивающий непосредственное формирование колебаний требуемой формы и вида для создания вибрационной силы, направленной по касательной к зоне контакта с подвижным звеном. Для изготовления преобразователей, как правило, применяют пьезо-» активные материалы (магнитострикционные или пъезокерамику).
Вибродвигатели обладают рядом достоинств, имеющих важное значение для использования их в качестве приводов микророботов, а именно: высокую разрешающую способность по перемещению, большой диапазон регулирования скоростей, высокие динамические качества переходных режимов, практическую нечувствительность к сильным магнитным и радиационным полям, широкий температурный диапазон.
В зависимости от исполнения число степеней подвижности вибродвигателей составляет 1-5 при твердых звеньях и может достигать бесконечности при использовании эластичных пъезоактивных материалов. Эти качества позволяют создавать прецизионные микророботы, манипулирующие с очень высокой точностью объектами с малыми массами (погрешность позиционирования не превышает 0,1-0,01 мкм).
К недостаткам вибродвигателей следует отнести повышенный износ контактирующих поверхностей и необходимость применения датчиков обратной связи по положению из-за отсутствия однозначной зависимости меоду числом периодов колебаний выибропреобразова- теля и положением подвижного звена
Схема высокочастотного вибропривода модуля выдвижения «руки» микроробота. К подвижному звену — «руке» робота 1-е помощью упругих элементов 2 и 3 с различной жесткостью () прижат вибропреобразователь 4, получающий питание от генератора электрических колебаний 5. Блок управления 6 в зависимости от управляющего сигнала 7 задает вибропреобразователю через генератор колебания требуемой формы и вида В результате в зоне контакта подвижного звена и преобразователя возбуждаются двумерные механические колебания высокой частоты, приводящие к возникновению постоянной составляющей силы, действующей вдоль оси X и приводящей «руку» модуля в движение в опорах 8 по координате х. Реализация обратных связей обеспечивается датчиками положения 9 и скорости 10. В качестве датчика силы может использоваться элемент вибропреобразователя 11 с цепью обратной связи 12. Для стабилизации процесса возбуждения колебаний предусмотрена обратная связь 13 по амплитудам колебаний вибропреобразователя. Возможны и иные схемы модулей движения с использованием виброприводов как поступательного, так и вращательного движений.
При комбинированном дизель-гидравлическом приводе первичным источником энергии является двигатель внутреннего сгорания (дизель).
Источник



