
- Привод поворотного стола станка с ЧПУ
- Электропривод на базе шагового двигателя
- Электроприводы шаговых двигателей для транспортных систем
- Шаговый привод для линейных перемещений
- Шаговый двигатель для поворотных операций
- Намоточное оборудование
- Поворотные столы. Часть 1. Привод.
- Описание
- Поворотные столы, часть 1. Привод (демоверсия)
Привод поворотного стола станка с ЧПУ

Поворотный стол с приводом применяются на многих многоцелевых станках с ЧПУ с вертикальной и, особенно, с горизонтальной компоновкой шпинделя (см. рис. 2 «Виды управления чпу станком и их отличия»). А на некоторых станках кроме одного поворотного стола 1 применяется дополнительно второй качающийся стол 2, позволяющий производить кроме поворота заготовки и ее наклон для обработки наклонных отверстий, плоскостей и других поверхностей (рис. 1).
Такие типы столов фирма, как правило, разрабатывает самостоятельно совместно со всей конструкцией станка.
Наряду с этим, в настоящее время ряд специализированных фирм разрабатывают и изготавливают разные типоразмеры таких столов, которые могут быть установлены как на разрабатываемый, так и на имеющийся станок с ЧПУ.
В качестве привода поворотного стола чаще всего используется регулируемый электродвигатель в комплекте с червячным редуктором 3, к которому в этом случае предъявляются высокие требования по точности поворота червячного колеса со столом.

Рис. 1. Комплект из поворотного и наклонного столов
В настоящее время проводится работа по упрощению конструкции этого привода на основе применения моментных электродвигателей, встраиваемых непосредственно в конструкцию стола.
В качестве примера на рис. 2 показан общий вид такого электродвигателя модели 1FW6 фирмы Siemens (ФРГ).
Он представляет собой трехфазный синхронный электродвигатель переменного тока с возбуждением от постоянных магнитов с ротором 1 с большим количеством полюсов и статором 2. ЭД имеет водяное охлаждение.
Для полного комплекта при установке привода поворотного стола в конструкцию необходимы опорные подшипники и измерительные преобразователи угловых перемещений.

Рис. 2. Схема моментного электродвигателя для поворотных столов: 1 — ротор; 2 — статор
Источник
Электропривод на базе шагового двигателя
Шаговые двигатели — электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Характер движения ротора шагового двигателя определяется частотой и характером изменения управляющих импульсов. Шаговые двигатели получили широкое распространение благодаря их техническим особенностям:
- Отработка точных перемещений
- Совместимость с цифровыми устройствами управления, в том числе промышленными контроллерами, а также персональным компьютером
- Легкая и высокоточная установка скорости
Отсутствие необходимости в обратной связи - Высокое развиваемое ускорение
- Ненакопительная ошибка позиционирования
- Хорошая нагрузочная характеристика (соотношение крутящий момент/скорость )
- Возможность удерживать нагрузку в стационарном положении без перегрева двигателя
- Широкий диапазон рабочих скоростей
Шаговые двигатели находят широкое применение в различном оборудовании:
- Приборы точной механики и оптики
- Измерительные приборы, в том числе спектрометры, газоанализаторы, приборы для анализа нефтепродуктов; оборудование для отбора проб; приборы для контроля качества зерна, муки и т. д.
- Дозаторы и питатели
- Перемешивающие устройства
- Робототехника
- Стрелочные приборы (спидометры, тахометры, комбинации, часы) для автоэлектроники, летных тренажеров и т. п.
- Спектрометры
- Медицинское и лабораторное оборудование
- Координатные и поворотные столы
- Приводы ЧПУ — фрезерные, гравировальные, шлифовочные, электроэррозионные станки, комплексы лазерной, плазменной, газовой резки.
- Приводы исполнительных механизмов конвейерных систем
- Упаковочное, фасовочное, сортировочное, этикеровочное оборудование
- Вязальное, вышивальное оборудование
- Оборудование для намотки
- Полиграфические автоматы
- Морские радиолокационные и гидроакустические станции
- Светотехническое оборудование
- Дисководы, факсимильные аппараты, принтеры, сканеры, копировальные машины, а также различная бытовая техника
- Теплотехника
- Приводы для систем безопасности — турникеты, поворотные камеры
- Специальное технологическое оборудование
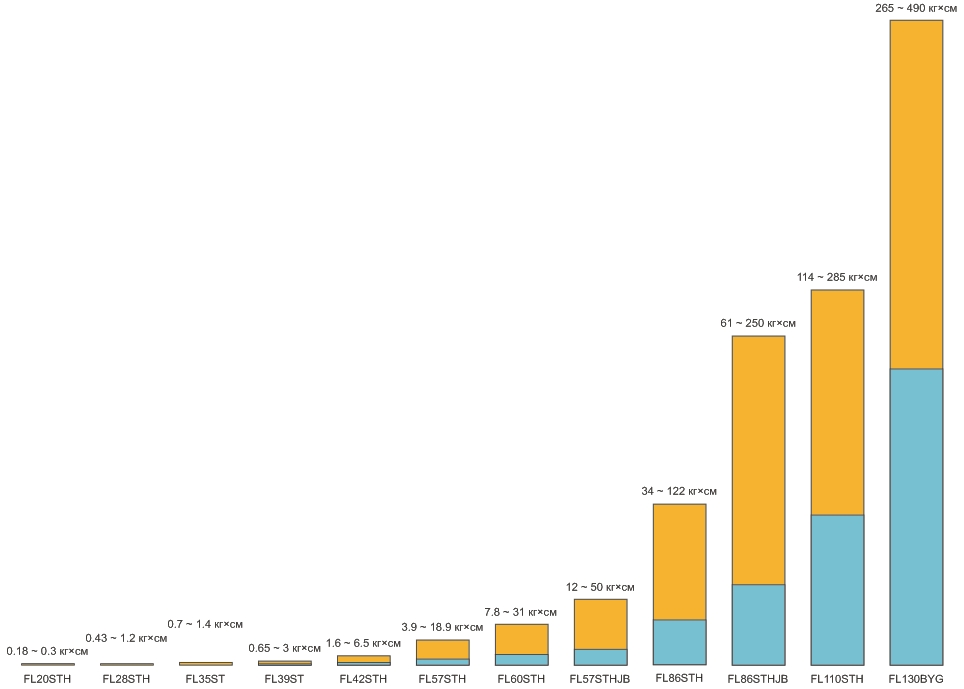
Мощность шагового электропривода варьируется в широких пределах, что обуславливает его применение для широкого класса задач. Максимальный крутящий момент, развиваемый шаговым двигателем в квазистатическом режиме, составляет 49 Н×м
Как правило, работой шагового двигателя управляет электронная схема, а питание его осуществляется от источника постоянного тока. Шаговые двигатели применяют для управления частотой вращения без применения дорогого контура обратной связи. Этот привод используется в приводе с разомкнутой цепью.
Управление без обратной связи хотя и является экономически выгодным, но имеет и ряд ограничений. Например, поворот ротора становится колебательным и нестабильным по значению конечных скоростей, вследствие чего характеристики движения, частота вращения и ускорение шагового двигателя с управлением без обратной связи не могут быть такими же точными, как у двигателей постоянного тока с обратной связью. Следовательно, уменьшение колебаний — это основная проблема, которую необходимо разрешить для расширения границ применения шаговых двигателей.
Наиболее важной особенностью шагового двигателя является то, что на каждый импульс управления ротор поворачивается на фиксированный угол, значение которого в градусах называется шагом. При получении команды логическая цепь определяет, какая фаза должна быть задействована и посылает сигнал управления на инвентор, определяющий значение тока шагового двигателя. Логическая схема обычно монтируется из транзисторных элементов или интегральных схем. Если выходной потенциал логической схемы высокий, возбуждается соответствующа фаза обмотки, например, фаза 1. Если выходной потенциал низкий, фаза обмотки с этим номером отключается. Двигатель вращается по часовой стрелке при управляющей последовательности 1 > 2 >3 >1 . направление против часовой стрелки реализуется при обратной последовательности 1 > 3 > 2 > 1 . При этом заранее оговаривается, каким в данных условиях считать направление вращения по часовой стрелке. Фазы обмотки обозначаются как 1,2,3 (4 — для четырехфазных двигателей) и т.д. либо A и B для некоторых двухфазных двигателей.
Шаговые двигатели относятся к классу бесколлекторных двигателей постоянного тока. Как и любые бесколлекторные электрические машины, они имеют высокую надежность и большой срок службы, что позволяет использовать их в индустриальных применениях. По сравнению с обычными электродвигателями постоянного тока, шаговые двигатели требуют сложных схем управления, которые должны выполнять все коммутации обмоток. Одним из главных преимуществ шаговых двигателей является возможность осуществлять точное позиционирование и регулировку скорости без датчика обратной связи. Это очень важно, так как такие датчики могут стоить намного больше самого двигателя. Однако это подходит только для систем, которые работают при малом ускорении и с относительно постоянной нагрузкой. Если нагрузка на ротор ШД превысит крутящий момент, то информация о положении ротора теряется и система потребует базирования с помощью, например, концевого выключателя или другого датчика.
При проектировании конкретных систем приходится делать выбор между сервоприводом и шаговым приводом. Когда требуется прецизионное позиционирование и точное управление скоростью, а требуемый момент и скорость не выходят за допустимые пределы, то шаговый привод является наиболее экономичным решением.
Задачи, решаемые при помощи шагового привода, разнообразны. Шаговые двигатели устанавливаются в устройствах и механизмах, требующих высокой надежности и точности. Конструкция шагового двигателя такова, что в ней отсутствуют изнашивающиеся детали. Рассмотрим некоторые типичные применения шагового привода.
Электроприводы шаговых двигателей для транспортных систем
Основные требования, предъявляемые к электродвигателям, используемым в транспортерах:
- Низкий уровень вибрации
- Точность/повторяемость останова
- Способность работать в запыленных, влажных и т. п. средах
- Параметры разгона/торможения
В качестве приводов транспортных систем традиционно используются шаговые двигатели и двигатели переменного тока (сервоприводы).
| Конвейер | Реверсивный конвейер | Конвейерные системы | Ременной транспортер |
 |  |  | |
| Элеватор | Лабораборное оборудование | Зубчатая рейка | Транспортер |
 |  |  |  |
| Промывочный конвейер | Использование датчиков позиционирования | Системы автоматизации | Дискретный транспортер |
 |  |  |  |
Шаговый привод для линейных перемещений
| Координатный стол | Координатный стол |
 |  |
Шаговый двигатель для поворотных операций
Основные требования, предъявляемые к электродвигателям, используемым в транспортерах:
- Разрешающая способность электромеханической системы
- Точность останова
В качестве приводов для поворотных операция традиционно используются шаговые двигатели и двигатели переменного тока (сервоприводы)
| Поворотный стол | Поворотный стол | Поворотная камера |
 |  |  |
Намоточное оборудование
В качестве приводов для операций намотки традиционно используются шаговые двигатели и двигатели переменного тока (сервоприводы)
Источник
Поворотные столы. Часть 1. Привод.
Описание
Поворотные столы, часть 1. Привод (демоверсия)
Одним из основных конструктивных элементом оборудования для автоматизации технологических процессов в машиностроении являются транспортирующие механизмы, предназначенные для перемещения обрабатываемой детали или комплекта собираемых деталей с одной позиции на другую. Все эти транспортирующие механизмы можно разделить на три основные группы, это поворотные столы и шаговые транспортеры и подачи, – применение которых определяется расположением рабочих позиций нестандартного оборудования и соответственно установленной при этом траекторией перемещения детали или комплекта деталей (по окружности, или по прямой).
Поворотные столы, а точнее поворотно – делительные столы, наиболее часто применяются в качестве транспортирующих механизмов в многоместном нестандартном оборудовании для механизации и автоматизации технологических процессов во всех технологических переделах машиностроительного производства. Конструкция поворотного стола применяемого для конкретного вида нестандартного оборудования определяется влиянием следующих факторов:
- величиной и направлением действия технологических усилий возникающих при работе оборудования,
- компоновкой в составе оборудования (вертикальное или горизонтальное расположение стола, а также его расположение относительно исполнительного механизма(ов), например агрегатных или сборочных головок и их привода),
- необходимой скоростью поворота и фиксации, устанавливаемых на основе расчета потребной производительности оборудования,
- точностью фиксированного положения стола с установленными (с базированными и закрепленными) деталями, при их перемещении с позиции на позицию.
Величина и направление действия сил определяет жесткость элементов конструкции поворотного стола, которые их воспринимают. Компоновкам стола в составе оборудования, а также необходимая скорость его поворота и фиксации существенным образом определяют тип привода. Точность фиксированного положения стола определяет прежде всего конструкцию механизма фиксации.
Поворотные столы могут иметь следующие виды привода: механический (электромеханический), гидравлический, пневматический, комбинированный (пневмо – гидромеханический, пневмогидравлический) привод. В качестве механического привода поворотных столов используются механизмы периодического действия: храповой механизм, мальтийский механизм, кулачково – цевочный механизм, рычажный механизм электромеханический привод с червячной передачей. В качестве гидравлического привода поворотных столов применяются – гидромоторы игидроповоротники, а в качестве пневматического привода – пневмоцилиндры и пневмоповоротники. При этом необходимо отметить, что гидроповоротники и пневмоповоротники применяется в поворотных столах совместно с зубчатой реечной передачей и обгонной муфтой, или храповым механизмом. Рассмотрим конструкции перечисленных типов привода поворотных столов.
Механический привод является наиболее распространенным видом привода поворотных столов благодаря, прежде всего, двум преимуществам, максимальной скорости поворота планшайбы и высокой точности ее фиксации. Основными типами механизмов позволяющими сформировать механический привод поворотного стола являются следующие: храповой механизм, мальтийский механизм, улито – цевочный механизм, рычажный механизм. Разновидностью механического привода поворотных столов является также и электромеханический привд, содержащий электродвигатель и систему механических передач.При этом различные типы и конструктивные схемы механического привода имеют специфические преимущества и недостатки привода.

На Рис 2 показана типовая конструкция привода планшайбы поворотно – делительного стола, выполненная на базе мальтийского механизма. Он содержит планшайбу 3, установленную посредствам подшипника скольжения 5 на оси 4 и опирающуюся своей нижней базовой плоскостью на ответную поверхность сборного корпуса стола, состоящего из тумбы 1 и плиты 2, а также червячное колесо 6, которое с помощью подшипника скольжения 7 и упорного шарикоподшипника 8 установлено с возможностью вращения на оси 4 (привод червячного колеса на Рис 2 не показан), на котором закреплен кривошип 9 с цевкой 10, зацепляющейся с мальтийским крестом 12, жестко закрепленным посредствам фланца 11 на промежуточном валу 13, на котором также закреплено ведущее зубчатое колесо 17, находящееся в зацеплении с шестерней 18, установленной на планшайбе 3. Ведущий кривошип 9 мальтийского механизма снабжен радиусным выступом, который при фиксации планшайбы поворотного стола находится в контакте с ответной радиусной выборкой мальтийского креста 12. При этом промежуточный вал 13 на шарикоподшипниках 14 расположен в вертикальной расточке корпуса 1 поворотного стола, а шестерня 18 закреплена на планшайбе 3 посредствам винтов 19 и штифтов (штифты на Рис 2 не показаны). Планшайба 3 имеет шесть базовых отверстий 20 расположенных равномерно по окружности, которые обеспечивают точное центрирование приспособлений – спутников, устанавливаемых на ее верхнюю базовую поверхность.
В данном разделе статьи содержится10 примеров механического
привода поворотных столов (см. Рис. в таб.) с описанием их работы

Гидравлический привод по сравнению с механическим приводом поворотных сто-лов обладает двумя существенными преимуществами, заключающимися в том, что он легко встраивается в цикл работы гидравлического оборудования автоматического действия и может быть расположен относительно исполнительного механизма, таким образом, что позволяет получить оптимальную компоновку оборудования в целом. В качестве гидравлического привода поворотных столов используются два типа гидродвигателей, это гидромоторы и гидроповоротники.
 На Рис 12 показана конструкция поворотного стола с приводом от гидромотора. Он содержит корпус 9, в котором установлен гидроцилиндр точной фиксации 8, а в отверстии его полого штока смонтирован с возможностью поворота вал 13, на одном конце которого закреплена планшайба 11, а на другом зубчатое колесо 4 и делительный диск 1, при этом зубчатое колесо 4 контактирует с шестерней 6, установленной на валу гидромотора 5, а делительный диск 1 – с фиксатором 14. Кроме этого, привод поворота оснащен механизмом предварительной и точной фиксации планшайбы 11. Механизм предварительной фиксации состоит из корпуса 23 закрепленного на приливе основного корпуса поворотного стола, фиксатора 14, выполненного за одно целое со штоком 19 и поршнем 20, поджатыми пружиной 18, золотника 15, с плунжером 16, который соединен с поршнем 20 посредствам толкателя 17. Делительный диск 1, обеспечивающий предварительное положение планшайбы 11, на наружной поверхности имеет впадины 21 в которые входит фиксатор 14 и выступы 22 которые имеют профильный заходный участок, по которому перед вхождением в паз 21 скользит фиксатор 14. Механизм точной фиксации выполнен в виде сцепной зубчатой муфты, на торцах полумуфт которой неподвижной 10 и подвижной 12 предусмотрены мелкие торцовые зубья, совмещение которых при фиксации обеспечивает точность углового положения планшайбы 11 в пределах 2 – 3 град. Для поиска и индикации требуемого углового положения планшайбы 11 предусмотрено электронное устройство 3 и блока микропереключателей 2.
На Рис 12 показана конструкция поворотного стола с приводом от гидромотора. Он содержит корпус 9, в котором установлен гидроцилиндр точной фиксации 8, а в отверстии его полого штока смонтирован с возможностью поворота вал 13, на одном конце которого закреплена планшайба 11, а на другом зубчатое колесо 4 и делительный диск 1, при этом зубчатое колесо 4 контактирует с шестерней 6, установленной на валу гидромотора 5, а делительный диск 1 – с фиксатором 14. Кроме этого, привод поворота оснащен механизмом предварительной и точной фиксации планшайбы 11. Механизм предварительной фиксации состоит из корпуса 23 закрепленного на приливе основного корпуса поворотного стола, фиксатора 14, выполненного за одно целое со штоком 19 и поршнем 20, поджатыми пружиной 18, золотника 15, с плунжером 16, который соединен с поршнем 20 посредствам толкателя 17. Делительный диск 1, обеспечивающий предварительное положение планшайбы 11, на наружной поверхности имеет впадины 21 в которые входит фиксатор 14 и выступы 22 которые имеют профильный заходный участок, по которому перед вхождением в паз 21 скользит фиксатор 14. Механизм точной фиксации выполнен в виде сцепной зубчатой муфты, на торцах полумуфт которой неподвижной 10 и подвижной 12 предусмотрены мелкие торцовые зубья, совмещение которых при фиксации обеспечивает точность углового положения планшайбы 11 в пределах 2 – 3 град. Для поиска и индикации требуемого углового положения планшайбы 11 предусмотрено электронное устройство 3 и блока микропереключателей 2.
Работает привод поворота стола следующим образом. При поступлении команды на поворот, масло подается в нижнюю полость гидроцилиндра точной фиксации 8, что приводит к подъему его поршня со штоком и выходу подвижной полумуфты 12 из зацепления с неподвижной полумуфтой 10. Затем масло подается в штоковую полость гидроцилиндра предварительной фиксации и фиксатор 14 выводится из соответствующего паза делительного диска 1. При этом, толкатель 17, перемещаясь вместе с фиксатором 14, смещает плунжер 16 золотника 15, что приводит к подаче масла в соответствующую полость гидромотора 5 и его вал вращает шестерню 6, которая, зацепляясь с зубчатым колесом 4, поворачивает вал 13 с планшайбой 11 на требуемый угол. При подходе планшайбы к заданному положению электронное устройство поиска 3 дает команду, и подача масла в штоковую полость гидроцилиндра предварительной фиксации прекращается, при этом под действием пружины 18 и давления в поршневой полости поршень 20 со штоком 19 опускаются до контакта фиксатора 14 с профильным заходным участком выступа 22 на делительном диске 1. Далее при повороте делительного диска 1 профильный участок выступа 22 перемещает фиксатор 14 вверх, что приводит к смещению плунжера 16 посредствам толкателя 17, передающего ему движение и дросселированию его конусной поверхностью потока масла поступающего и сливающегося из гидромотора 5, что обеспечивает, плавное торможения планшайбы 11. После вхождения фиксатора 14 в паз 21 делительного диска 1 срабатывает микропереключатель 2 и дает команду на подачу масла в верхнюю полость гидроцилиндра 8 обеспечивающую перемещение его штока с валом 13 вниз, что приводит к вхождению в зацепление зубчатых полумуфт 10 и 12 и точной фиксации планшайбы 11. Для обеспечения поворота вала гидромотора, при выполнении точной фиксации планшайбы, на некоторый угол его обе полости напорная и сливная соединяются через канавку в плунжере 16 золотника 15.
В данном разделе статьи содержится 10 примеров гидравлического
привода поворотных столов (см. Рис. в таб.) с описанием их работы

Пневматический привод поворотного стола осуществляемый от пневмоцилиндра или пневмоповоротника, по сравнению с гидравлическим приводом обладает двумя основными преимуществами, простотой (отсутствие гидростанции) и возможностью развивать более высокие скорости. Пневмоцилиндры и пневмоповоротники, используемые в качестве привода поворотного стола, как правило, работают совместно с зубчатой передачей или механизмом, например храповым, поэтому такой привод правильней считать пневмомеханическим. Для повышения плавности поворота планшайбы поворотного стола пневматический привод может быть совмещен с гидравлическим приводом низкого давления.
 На Рис. 25 показана конструкции пневмомеханического привода поворотного стола с храповым механизмом с повышенной точностью фиксации его положения. Он содержит храповое колесо 1, с которым жестко связана планшайба поворотного стола (планшайба на Рис 25 не показана), собачку 2, шарнирно установленную посредством оси 17 на коромысле 3 и также шарнирно связанную со штоком 13 приводного пневмоцилиндра 12, передаточный механизм, содержащий рычаг 5 с роликом 4 и упорным винтом 14, и стопорный механизм. Стопорный механизм включает, установленный во втулке 6 толкатель 7, запирающий клин 8, клиновая поверхность которого посредством пружины 15, установленной на цилиндрической скалке 11 постоянно поджата к ответной наклонной поверхности на левом торце толкателя 7, а также пружинный буфер 9 и дополнительный жесткий упор, выполненный в виде регулируемого винта 10. При этом, собачка 2 постоянно поджата к храповому колесу 1 посредством пружины 19 один конец которой закреплен на собачке 2, а другой на коромысле 3, а ролик 4 рычага 5 пружиной 16 постоянно поджат к переднему торцу клина 8, в то время как его упорный винт 14, находящийся в контакте с нерабочей поверхностью собачки 2.
На Рис. 25 показана конструкции пневмомеханического привода поворотного стола с храповым механизмом с повышенной точностью фиксации его положения. Он содержит храповое колесо 1, с которым жестко связана планшайба поворотного стола (планшайба на Рис 25 не показана), собачку 2, шарнирно установленную посредством оси 17 на коромысле 3 и также шарнирно связанную со штоком 13 приводного пневмоцилиндра 12, передаточный механизм, содержащий рычаг 5 с роликом 4 и упорным винтом 14, и стопорный механизм. Стопорный механизм включает, установленный во втулке 6 толкатель 7, запирающий клин 8, клиновая поверхность которого посредством пружины 15, установленной на цилиндрической скалке 11 постоянно поджата к ответной наклонной поверхности на левом торце толкателя 7, а также пружинный буфер 9 и дополнительный жесткий упор, выполненный в виде регулируемого винта 10. При этом, собачка 2 постоянно поджата к храповому колесу 1 посредством пружины 19 один конец которой закреплен на собачке 2, а другой на коромысле 3, а ролик 4 рычага 5 пружиной 16 постоянно поджат к переднему торцу клина 8, в то время как его упорный винт 14, находящийся в контакте с нерабочей поверхностью собачки 2.
Работает привод следующим образом. При выдвижении штока 13 пневмоцилиндра 12 происходит поворот против часовой стрелки коромысла 3 вместе с собачкой 2, которая, западая в соответствующее гнездо храпового колеса 1, упирается своей рабочей поверхностью в ответную поверхность паза колеса и таким образом поворачивает его в том же направлении. В конце хода штока 13 превмоцилиндра 12 собачка 2 упирается в толкатель 7, который при этом начинает сжимать пружинный буфер 9, при этом увеличивается пространство между правым торцем втулки 6 и наклонной поверхностью на левом торце толкателя 7, в результате чего, запирающий клин 8 под действием пружины 15 перемещается в освободившееся пространство и воздействует на ролик 4 рычага 5. Последний, при этом, поворачивается на некоторый угол на оси 18 и своим упорным винтом 14 дополнительно прижимает собачку 2 к рабочей поверхности храпового колеса 1, выбирая возможные зазоры. Конечное положение храпового колеса 1 и соответственно связанной с ним планшайбы поворотного стола определяется жестким упором 10, положение которого может регулироваться. В конце хода штока 13 пневмоцилиндра 12 и соответственно поворота храпового колеса 1 с планшайбой поворотного стола скорость замедляется, поскольку пружинный буфер 10 гасит кинетическую энергию подвижных частей стола и привода. При обратном ходе штока 13 пневмоцилиндра 12 коромысло 3 с собачкой 2 свободно поворачиваются по часовой стрелке (в это время планшайба поворотного стола фиксируется тормозом, который на Рис 25 не показан), и воздействуя через упорный винт 14 на рычаг 5 поворачивает его на оси 18 против часовой стрелки, при этом, рычаг 5 принудительно выталкивает клин 8, который перемещаясь назад позволяет пружинному буферу 9 вернуть толкатель 7 в исходное положение.
В данном разделе статьи содержится 10 примеров пневматического
привода поворотных столов (см. Рис. в таб.) с описанием их работы

Полная версия статьи содержит 35 страниц текста и 32 рисунка
1. Игнатьев Н.П. Основы проектирования Азов 2011г.
2. Игнатьев Н.П. Проектирование нестандартного оборудования Азов 2013г.
3. Игнатьев Н.П. Проектирование механизмов Азов 2015г.
Для приобретения полной версии статьи добавьте её в корзину,
Стоимость полной версии статьи 150 рублей.
Источник



