
- Главный привод для шпинделя/ dc motor 4006
- Главный привод для шпинделя/ dc motor 4006
- Napęd główny
- Цифровой тиристорный преобразователь ELL 4006
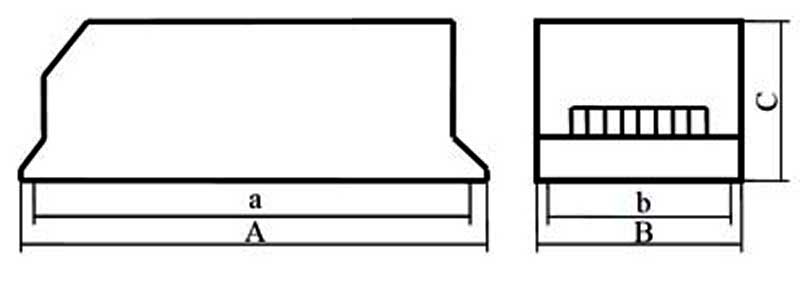
- Конструктивное исполнение
- Привод мотора шпинделя ell4006 221 10
- Преобразователи ELL 4ХХХ
- Устройство и принцип действия
- Функциональные возможности
- Оплата и доставка
- Варианты оплаты
- Варианты доставки
- Сроки и стоимость доставки
- Тиристорные преобразователи серии ELL 4ХХХ для двигателей постоянного тока с независимым возбуждением (снят с производства). Техническое описание. Паспорт.
Главный привод для шпинделя/ dc motor 4006
Главный привод для шпинделя/ dc motor 4006
Napęd główny
Napędy serii 4XXX to nowe pokolenie inteligentnych tyrystorowych napędów, opracowanych na bazie najnowszych technologii (DSP/CPLD) i zapewniają czterokwadratowe sterowanie prędkością silnika. Wszystkie tryby pracy napędu ustawiania się za pomocą odpowiednich parametrów.
Napędy serii 4XXX są absolutnie uniwersalne i mogą być zastosowane w każdej maszynie o bardzo wysokich wymogach elektrycznego układu napędowego a równocześnie mają wbudowane różne funkcje i interfejs specyficzny dla napędu głównego w obrabiarkach CNC do metalu. Posiadają rozbudowany interfejs zapewniający dużą wariantowość spełniającą potrzeby użytkownika.
Przed złożeniem zamówienia, prosimy o kontakt w celu sprawdzenia dostępności.
- Orientacja i pozycjonowanie wrzeciona
- Współpraca z silnikami do napędu wrzeciona oraz osi z niezależnym wzbudzeniem
- Współpraca z komputerem lub dedykowanym terminalem
- Diagnostyka silnika-napędu-przetwornika
- Sterowanie cyfrowe albo analogowe w dwóch wariantach: +/- 10V lub +10V oraz komendy FWD, REV, STOP
- Przetwornica cyfrowo-analogowa
- Współpraca z kółkiem ręcznym
- Tachoprądnica albo przetwornik obrotowo impulsowy
Maksymalne napięcie na tworniku:
Maksymalny prąd wzbudzenia silnika:
Ograniczenie prądu stojana:
Maksymalne napięcie wzbudzenia:
Sygnał sprzężenia zwrotnego prędkości:
- Tachoprądnica lub przetwornik impulsowo-obrotowy
- Analogowy / kod równoległy / interfejs szeregowy
- Kod równoległy / interfejs szeregowy
Zakres regulacji prędkości:
Maksymalne napięcie tachoprądnicy:
- ± 10 V / 0 ÷ 10 V / 0 ÷ -10 V, 10KOM / ÷ 10 FWD, REV, STOP
- 5 wyjść, typ przekaźnikowy, 100 VAC / 0,3 A, 24 VDC / 0,3 A
- RS 232 C do 9600 bps, RS 485 do 115 200 bps
- Napięcie zasilania podawane jest przez transformator do regulatora
- Standardowe wejście cyfrowe posiada uruchomione tylko 2 wejścia. Pozostałe 8 wejść może być uruchomione na specjalne zamówienie;
- Interfejs szeregowy RS 485 może być zamontoway na specjalne zamówienie
Po więcej informacji zapraszamy na https://bulmach.com/
Skontaktuj się z nami, a przygotujemy propozycję, która uwzględni Twoje oczekiwania i potrzeby.
Источник
Цифровой тиристорный преобразователь ELL 4006


Обновлено 02.11.2021. Наличие склада обновляется по субботам.

Приём заявок: круглосуточно
Обработка заявок: 8:00-17:00 (будни)
* самовывоз из ТК «Деловые Линии» при заказе от 1000 руб.
Цифровой тиристорный преобразователь ELL 4006 предназначен для прецизионного управления скорости и позиции двигателей постоянного тока с независимым возбуждением для главных приводов и приводов подачи. Их управление реализовано современным DSP процессорами и обеспечивает приводу разнообразные функциональные возможности, высокую надёжность и стабильность эксплуатационных характеристик.
| Преобразователь, тип: | 4003 | 4004 | 4005 | 4006 | 4007 | 4009 | 4011 | 4013 | 4016 | 4020 | 4025 | 4030 | 4040 | 4050 | 4060 | 4070 |
| Номинальный ток якоря, А | 30 | 40 | 50 | 60 | 70 | 90 | 110 | 130 | 160 | 200 | 250 | 300 | 400 | 500 | 600 | 700 |
| Максимальный ток якоря, А | 60 | 80 | 100 | 120 | 140 | 180 | 220 | 260 | 320 | 400 | 500 | 600 | 800 | 1000 | 1200 | 1400 |
| Напряжение силового питания, В | 3×380, +10 / -15% | |||||||||||||||
| Частота силового напряжения питания, Гц | 45 ÷ 65 | |||||||||||||||
| Максимальное напряжение якоря, В | 440 | |||||||||||||||
| Диапазоны номинального тока возбуждения, А 2 | 20.0 / 10.0 / 6.5 1 12.0 / 6.0 / 4.0 4.7 / 2.4 / 1.5 | |||||||||||||||
| Максимальное напряжение возбуждения, Vdc | 320 при UF = 380VAC | |||||||||||||||
| Датчик обратной связи по скорости | Тахогенератор / Энкодер / ЭДС | |||||||||||||||
| Максимальное напряжение тахогенератора, В | ± 193 при NMAX | |||||||||||||||
| Датчик обратной связи по позиции | Энкодер | |||||||||||||||
| Задание для скорости | Аналоговое задание, параллельный код – до 14 bit, серийный интерфейс | |||||||||||||||
| Аналоговое задание для скорости, В | ± 10 / 0 ÷ 10 / 0 ÷ -10 | |||||||||||||||
| Задание для позиции | Внутреннее цифровое задание / серийный интерфейс | |||||||||||||||
| Диапазон регулирования скорости | 1:10000 | |||||||||||||||
| Аналоговые выходы 3 | 2 выхода, ± 10V, 2 mA | |||||||||||||||
| Цифровые входы | 18 входов, ± 24V, 10 mA | |||||||||||||||
| Цифровые выходы | 5 выходов релейного типа, 100VAC / 0.3A, 24VDC / 0.3A | |||||||||||||||
| Серийные интерфейсы 4 | ||||||||||||||||
| Режим работы | Продолжительный S1 | |||||||||||||||
| Степень защиты | IP 20 | |||||||||||||||
| Температура окружающей среды, C° | 0 ÷ 50 | |||||||||||||||

Функциональные возможности
Преобразователи ELL 4ХХХ обеспечивают:
- прецизионное четыре квадрантное управление двигателей постоянного тока с независимым возбуждением для главных приводов и приводов подачи;
- работу двигателя в до трех зонах;
- возможность для работы только в первой зоне без ослабления поля;
- обратная связь по скорости от тахогенератора, энкодера или от ЭДС якоря;
- автоматическое определение сопротивления цепи якоря;
- автоматическое определение очередности следования фаз сети питания и возможность для работы при «левом» и «правом» вращении фаз;
- возможность переключения до четырех максимальных скоростей при работе со станками имеющими коробку передач и смена коэффициента передачи между энкодером и двигателем;
- задание для скорости с параллельным 10-битовым кодом при работе с коробкой передачи с переключением коэффициента передачи;
- ограничение момента на двух уровнях TLL и TLH;
- возможность для наблюдения основных переменных электропривода;
- введение и измерение переменных тока, напряжения и частоты электропривода в естественных единицах – амперы, вольты и герцы;
- настройку параметров с компьютерной программой ELL RS232 V2.0 под ОС WINDOWS.
Оплата и доставка
Важно! Мы работаем только в юридическими лицами. Отгрузка оборудования осуществляется только после 100% оплаты заказа.
Варианты оплаты
Варианты доставки
Сроки и стоимость доставки
Все оборудование отгружается со склада в г. Белгород. Сроки и стоимость поставки зависят от вида и наличия промышленного оборудования и составляют от пяти до 45 календарных дней. Ориентировочную стоимость и сроки можно посчитать с помощью калькулятора ниже:
Тиристорные преобразователи серии ELL 4ХХХ для двигателей постоянного тока с независимым возбуждением (снят с производства). Техническое описание. Паспорт.

Цифровые тиристорные преобразователи серии 4ХХХ предназначены для прецизионного управления скоростью, моментом или позицией двигателей постоянного тока с независимым возбуждением для главных приводов и приводов подачи. Их управление реализовано современным DSP процессорами и обеспечивает электроприводу расширенные функциональные возможности, высокую надежность и стабильность характеристик во время эксплуатации.
Основное направление использования преобразователей серии 4ХХХ является модернизация станков с приводами постоянного тока с высокими требованиями к качеству управления по доступным ценам. Гибкий интерфейс этих преобразователей позволяет легко подключить их к ЧПУ различных производителей.
Основные функциональные возможности преобразователей серии 4ХХХ:
- силовой блок преобразователя реализован по трехфазной встречно-параллельной мостовой схеме с раздельным управлением;
- прецизионное четырехквадрантное управление двигателей постоянного тока с независимым возбуждением для главных приводов и приводов подачи;
- цифровой адаптивный PID регулятор скорости с адаптацией в функции от действительной скорости;
- возможность для гибкой настройки параметров адаптивного регулятора скорости, включая и пороги их действия;
- работа двигателя в до трех зонах:
- первая зона – работа с постоянным крутящим моментом;
- вторая зона – работа с постоянной мощностью;
- третья зона – работа с уменьшением мощности.
- возможность для работы только в первой зоне без ослабления поля;
- цифровой регулятор тока якоря;
- цифровой регулятор ЭДС;
- цифровой регулятор тока возбуждения;
- цифровой регулятор позиции;
- динамический диапазон регулирования скорости – выше 1:10000;
- инерционная синхронизация преобразователя, позволяющая надежную работу при питание преобразователя от сети с сильными помехами;
- обратная связь по скорости от тахогенератора, энкодера или от ЭДС якоря;
- задание для скорости: аналоговое ±10V, аналоговое однополярное 0 ÷ 10V со знаком, цифровое с параллельным кодом до 14 бит или по последовательному интерфейсу;
- задание для позиции: внешнее цифровое с параллельным кодом до 14 бит, внутреннее цифровое задание или по последовательному интерфейсу;
- BIN или BCD формат параллельного задания для позиции;
- программируемое динамическое токоограничение тока якоря по функцию 1/n;
- три диапазона тока возбуждения с возможностью для переключения;
- автоматическое определение сопротивления цепи якоря;
- автоматическое определение очередности следования фаз сети питания и возможность для работы при „левом” и „правом” вращении фаз;
- система программируемых и аппаратных защит, обеспечивающих безопасную работу преобразователя и электропривода;
- возможность переключения до четырех максимальных скоростей при работе со станками имеющими коробку передач и смена коэффициента передачи между энкодером и двигателем;
- задание для скорости с параллельным 10-битовым кодом при работе с коробкой передачи с переключением коэффициента передачи;
- встроенная функция ориентированное торможение;
- разные алгоритмы для выполнения функции ориентированного торможения;
- возможность для управления преобразователя по моменту;
- ограничение момента на двух уровнях TLL и TLH;
- встроенный рампгенератор регулятора тока якоря с целью уменьшения ударов зубных передач при смене знака крутящего момента двигателя;
- универсальные цифровые входы для работы с сигналами с положительной или отрицательной полярностью;
- разделение цифровых входов в двух группах с возможностью для питания каждой из них внутренним или внешним оперативным напряжением;
- конфигурация и выбор режима работы цифровых входов с присвоением функций и сменой их активного логического состояния;
- конфигурация и выбор режима работы цифровых выходов с присвоением функций и сменой их активного логического состояния;
- два аналогового выхода с возможностью для выбора измеряемой переменной;
- последовательный интерфейс RS232 со скоростью 9600 бод для настройки преобразователя;
- настройка преобразователя с системой параметров группированных в шестнадцати группах;
- возможность для наблюдения основных переменных электропривода;
- введение и измерение переменных тока, напряжения и частоты электропривода в естественных единицах – амперы, вольты и герцы;
- специальные средства для предварительной настройки привода;
- проверка состояния цифровых входов и выходов;
- выбор рабочего языка для программирования;
- проверка состояния датчика обратной связи по скорости;
- проверка состояния датчика обратной связи по позиции;
- оценка качества сети питания;
- проверка состояния силовых тиристоров;
- история ошибок с возможностью для прослеживания последних шестнадцати сообщений об возникнувших ошибках;
- настройка параметров с компьютерной программой ELLRS232V2.0 под ОС WINDOWS.
- управление преобразователем по протоколу MODBUS;
Источник



