
Расчеты необходимой мощности привода
ПРАКТИЧЕСКАЯ РАБОТА № 1 КИНЕМАТИЧЕСКИЙ РАСЧЕТ ПРИВОДА
Цель работы:
1. Изучить последовательность выполнения кинематического расчета привода.
2. Ознакомиться с примером кинематического расчета привода.
3. Выполнить кинематический расчет привода для индивидуального задания.
Порядок выполнения кинематического расчета привода. Проектирование машины любого типа начинается с расчета привода, который начинают с выбора двигателя по потребной мощности, кинематической схеме привода и условиям эксплуатации, указанным в задании на разработку машины. Требуемую мощность двигателя определяют на основании исходных данных – рабочих характеристик машины.
Если указана мощность  (
( ) на выходном валу привода, то расчетная мощность на входном валу привода определяется по зависимости:
) на выходном валу привода, то расчетная мощность на входном валу привода определяется по зависимости:
 , (1)
, (1)
где  — коэффициент полезного действия (КПД) привода, который равный произведению частных КПД элементов привода
— коэффициент полезного действия (КПД) привода, который равный произведению частных КПД элементов привода
 , (2)
, (2)
где  — КПД отдельных звеньев кинематической цепи привода, ориентировочные значения, которых приведены в таблице 1.1.
— КПД отдельных звеньев кинематической цепи привода, ориентировочные значения, которых приведены в таблице 1.1.
С учетом расчетной мощности на входном валу привода определяется мощность двигателя привода из условия  .
.
Если на выходном валу указаны вращающий момент  (
( ) и его угловая скорость
) и его угловая скорость  (
( ), то мощность привода
), то мощность привода
 . (3)
. (3)
Если на выходном валу указаны тяговое усилие  (
( )и его скорость
)и его скорость  (
( ), то мощность на входном валу привода
), то мощность на входном валу привода
 . (4)
. (4)
Таблица 1.1. Средние значения коэффициентов полезного действия элементов привода
с цилиндрическими колесами
с цилиндрическими колесами
Закрытая червячная при числе



В большинстве стационарных машин в качестве двигателя принимается трехфазный асинхронный электродвигатель, характерной особенностью которого является синхронная частота вращения, которая в зависимости от числа пар полюсов  может быть
может быть  3000;1500;1000;750;600; 500 об/мин. Для обеспечения заданной скорости на выходном валу привода его передаточное отношение
3000;1500;1000;750;600; 500 об/мин. Для обеспечения заданной скорости на выходном валу привода его передаточное отношение
 (5)
(5)
Передаточное отношение привода равно произведению передаточных отношений всех передач привода:
 , (6)
, (6)
где  — передаточное отношение отдельных передач кинематической цепи привода.
— передаточное отношение отдельных передач кинематической цепи привода.
Передаточные отношения для различных видов механических передач приведены в таблице 1.2.
Таблица 1.2. Средние значения передаточных отношений механических передач
с цилиндрическими колесами
с четырехзаходным червяком
При кинематическом расчете привода принята нумерация валов начиная от вала приводного двигателя. Для каждого вала определяется мощность, момент и его угловая скорость (частота вращения) с учетом КПД передач и их передаточного отношения.
Мощность на  том валу привода
том валу привода
 . (7)
. (7)
Угловая скорость на том валу привода
 . (8)
. (8)
Момент том валу привода
 . (9)
. (9)
2. Пример расчета. Определить мощность привода ленточного транспортера, представленного на рис. 1.1. Рассчитать мощность, момент и угловую скорость на каждом валу привода.
Исходные данные. Тяговое усилие на ленте  10 кН, скорость движения ленты
10 кН, скорость движения ленты  . 1 м/с. Электродвигатель с синхронной частотой вращения 1500 об/мин. Диаметр приводного барабана транспортера
. 1 м/с. Электродвигатель с синхронной частотой вращения 1500 об/мин. Диаметр приводного барабана транспортера  800 мм. Передаточные отношения ременной, зубчатой и цепной передач:
800 мм. Передаточные отношения ременной, зубчатой и цепной передач:  3,45;
3,45;  5,6;
5,6; 3,25.
3,25.

Рис.1.1. Кинематическая схема привода: 1 – двигатель, 2 – клиноременная передача, 3 – закрытая зубчатая передача, 4 – цепная передача, 5 – барабан ленточного конвейера.
1. Принимаем КПД элементов привода по таблице 1.1:
 0,97 — КПД ременной передачи,
0,97 — КПД ременной передачи,
 0,97 – КПД зубчатой передачи,
0,97 – КПД зубчатой передачи,
 0,92 – КПД цепной передачи,
0,92 – КПД цепной передачи,
 0,99 –КПД пары опорных подшипников.
0,99 –КПД пары опорных подшипников.
2. Общий КПД привода по формуле (2):
 0,84.
0,84.
3. Частота вращения приводного барабана:
 23,9 об/мин.
23,9 об/мин.
4. Передаточное отношение привода по формуле (5):
 62,8.
62,8.
Проверка передаточного отношения для заданных передаточных отношений передач по формуле (6)
 62,8.
62,8.
5. Расчетная мощность на валу двигателя привода определяется по формуле (1)
 11900 Вт = 11,9 кВт.
11900 Вт = 11,9 кВт.
6. Угловые скорости, мощности и крутящие моменты на валах привода:
I вал – вал двигателя:
 157 1/с,
157 1/с,
 кВт,
кВт,
 .
.
II вал – входной вал редуктора:
 45,5 1/с,
45,5 1/с,
 11,4 кВт,
11,4 кВт,

III вал – выходной вал редуктора:
 8,1 1/с,
8,1 1/с,
 10,9 кВт,
10,9 кВт,

IV вал – вал барабана:
 2,5 1/с,
2,5 1/с,
 10 кВт,
10 кВт,
 .
.
Проверка тягового усилия на ленте конвейера:
 н = 10 кН.
н = 10 кН.
3. Индивидуальные задания для выполнения кинематического расчета привода.
Индивидуальные задания по практической работе выполняются для кинематической схемы, представленной на рис.1.1. с исходными данными приведенными в таблицах 1.3,1.4.
Необходимо определить мощность привода ленточного транспортера, представленного на рис. 1.1. Рассчитать мощность, момент и угловую скорость на каждом валу привода.
Таблица 1.3. Исходные данные для кинематической схемы рис.1.1.
Мощность на выходном валу привода, кВт
Синхронная частота вращения двигателя, об/мин
Источник
Выбор электрического привода и определение его динамических свойств

Федеральное агентство по образованию
ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
ВОЛГОГРАДСКОГО ГОСУДАРСТВЕННОГО ТЕХНИЧЕСКОГО УНИВЕРСИТЕТА
КАФЕДРА «ЭЛЕКТРОСНАБЖЕНИЕ ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ»
ВЫБОР ЭЛЕКТРИЧЕСКОГО ПРИВОДА
Методические указания к выполнению
по дисциплине «Электрический привод»
РПК «Политехник»
ВЫБОР ЭЛЕКТРИЧЕСКОГО ПРИВОДА И ОПРЕДЕЛЕНИЕ ЕГО ДИНАМИЧЕСКИХ свойств: Методические указания к выполнению расчетно-графической работы по дисциплине «Электрический привод» / Сост. , ; Волгоград. гос. техн. ун-т. – Волгоград, 2007. – 18 с.
Изложена методика выбора электрического привода и определения его динамических свойств, приведен примерный расчет электропривода, а также варианты заданий на выполнение расчетно-графической работы.
Предназначены в помощь студентам, обучающимся по специальности 140211.65 «Электроснабжение», при выполнении ими расчетно-графической работы.
Ил. 1. Табл. 1. Библиогр.: 3 назв.
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
 технический
технический
Данная методика позволяет произвести расчет электрического привода (двигателя и инвертора) для обеспечения требуемого рабочего режима механизма.
Все нижеприведенные расчеты корректны до скоростей, не превышающих номинальную скорость двигателя (первая зона). Для расчетов на скоростях второй и третьей зоны, необходимо иметь данные по моментной характеристике двигателя на повышенных скоростях. Эти данные можно получить у производителей двигателей. Расчет производится в этом случае по отрезкам скорости в различных диапазонах скоростей. Если данные по моментной характеристике двигателя для второй зоны не удается получить, для приблизительного расчета можно принять следующее: с увеличением скорости в 2 раза, момент уменьшается в 3-4раза (необходимо помнить, что это только для приблизительного ориентировочного расчета, т. к. падение момента у разных типов двигателей различно!).
Необходимо так же учитывать, что и перегрузочная способность асинхронного двигателя так же уменьшается на скоростях выше номинальной.
1. ОПРЕДЕЛЕНИЕ МОЩНОСТИ ДВИГАТЕЛЯ
Для выбора мощности двигателя необходимо знать рабочий момент нагрузки Mн момент инерции нагрузки Jн, рабочие скорости, требуемое время разгона tр и торможения tт.
Рабочий момент определяет силовую работу привода на постоянной скорости (установившийся режим). Инерция нагрузки, величина рабочей скорости и требуемое время разгона-торможения определяют динамику привода.
Значение рабочего момента и рабочей скорости позволяет сделать предварительный выбор привода по мощности: Mном > Mн.
Момент двигателя определяется следующей формулой:
 , (1)
, (1)
где Mном – номинальный момент двигателя, Нм;
Рном – мощность двигателя, кВт;
Nном – номинальные обороты двигателя, об/мин.
На основе заданного момента и необходимого числа оборотов выбирается мощность двигателя:
 . (2)
. (2)
Данная формула справедлива для асинхронных двигателей и двигателей постоянного тока, что может помочь при замене привода постоянного тока на частотно-регулируемый асинхронный привод
Необходимо помнить, что при расчете необходимо в обязательном порядке пользоваться величинами моментов и моментов инерции нагрузки, приведенных к валу двигателя с учетом имеющегося редуктора. В противном случае расчет некорректный.
Момент нагрузки, приведенный к валу двигателя с учетом редукции:
 , (3)
, (3)
где Mном. н. – момент нагрузки, приведенный к валу двигателя, Нм;
i – коэффициент редукции (передаточное число).
Момент инерции, приведенный к валу двигателя с учетом редукции
 , (4)
, (4)
где Jном. н. – момент инерции нагрузки, приведенный к валу двигателя, кгм2;
Jн – момент инерции нагрузки, кгм2;
i – коэффициент редукции (передаточное число).
После предварительного выбора проводится уточнение выбора привода с учетом требуемой динамики. Здесь более полно учитываются требования к приводу. При этом дополнительно рассматриваются режимы разгона и торможения.
В этом режиме нагрузку приводу создают динамический момент нагрузки Mдин и статический момент Mст, действующий в период разгона (обычно это сила трения механизма, но бывают и более серьезные нагрузки, например поршневой компрессор или шнек экструдера). Т. е. в некоторых случаях статическим моментом в период разгона можно пренебречь (небольшой момент трения), а в некоторых случаях его необходимо учитывать (где этот момент достаточно существенный).
Динамический момент нагрузки в период разгона определяется формулой:
 , (5)
, (5)
где Mдин – динамический момент нагрузки, Нм;
tс – время изменения скорости, сек;
∆n – диапазон изменения скорости, об/мин.
Jном. н – момент инерции нагрузки, приведенный к валу двигателя, кгм2.
Суммарный момент нагрузки, действующей на привод в период разгона будет равен:
где Мраз – суммарный момент нагрузки, приложенный к двигателю в процессе разгона, Нм;
Mст – статический момент нагрузки, приведенный к валу двигателя, Нм.
Работа привода в установившемся режиме
Это режим работы на постоянной скорости с приложенной рабочей нагрузкой. В этом случае основной нагрузкой является рабочий момент Mн.
Работа привода в режиме торможения
Это режим заданного замедления привода. Момент нагрузки, приложенный к двигателю, в данном случае будет:
где Mтор – момент нагрузки, приложенный к двигателю в процессе торможения, Н.
Далее рассчитывается эффективный момент нагрузки:
 , (8)
, (8)
где Мэфф – эффективный момент нагрузки, Нм;
Мраз – момент нагрузки в период разгона, Нм;
Mн – рабочий момент нагрузки в установившемся режиме, Нм;
Mт – момент нагрузки в период торможения, Нм;
tуст – время в установившемся режиме, сек;
На основе полученного значения эффективного момента нагрузки производится уточненный выбор двигателя по условию:
2. ДИНАМИЧЕСКИЙ РАСЧЕТ ПРИВОДА
Выбрав двигатель на основе значения требуемого значения эффективного момента Мэфф. производится динамический расчет привода.
2.1. Расчет времени разгона привода
Расчет времени разгона привода tраз определяется по формуле:
 , (10)
, (10)
где Jном. н – момент инерции нагрузки, приведенной к валу двигателя, кгм2;
Jр – момент инерции ротора двигателя, кгм2;
Nmax – максимальная скорость двигателя, об/мин;
Nmin – минимальная скорость двигателя, об/мин;
Mном. н. – номинальный момент двигателя, Нм;
Mст – момент нагрузки (трение и т. п.), приведенный к валу двигателя, Нм;
К – перегрузочный коэффициент привода.
Пояснение. Для расчета обычно принимается Nmin = 0 об/мин. Перегрузочный коэффициент К берется из силовых характеристик инвертора, например при перегрузочной способности инвертора по моменту 150%, перегрузочный коэффициент К будет равен 1,5.
Если расчетное время разгона не удовлетворяет заданию, выбирается инвертор или весь привод большей мощности и производится повторный расчет.
2.2. Расчет времени торможения привода
Возможно использование привода без тормозного резистора, в этом случае рассчитывается минимальное время, за которое инвертор способен остановить двигатель с данной нагрузкой без генераторного режима. Если это время не удовлетворяет условиям эксплуатации, тогда производится расчет привода с использованием тормозного резистора.
Минимальное время торможения без тормозного резистора:
 , (11)
, (11)
где tтор – минимально возможное время торможения без использования тормозного резистора, сек;
Jном. н – момент инерции нагрузки приведенный к валу двигателя, кгм2;
Jр – момент инерции ротора двигателя, кгм2;
Nmax – максимальная скорость привода, об/мин;
Nmin – минимальная скорость привода, об/мин (обычно принимается 0 об/мин);
Mном – номинальный момент двигателя, Нм;
Mст – момент нагрузки (трение и т. п.), приведенный к валу двигателя, Нм;
В – коэффициент торможения.
Значения коэффициентов торможения В для электродвигателей различной мощности приведены в табл. 1.
Табл. 1. Значения коэффициентов торможения В
Мощность электродвигателя, кВт
Если время торможения привода без тормозного резистора не удовлетворяет техническим требованиям на привод, производится расчет привода для режима торможения по заданному времени с использованием тормозного резистора (естественно, при наличии в инверторе тормозного транзистора).
Для этого определяется необходимый тормозной момент для замедления привода за заданное время tтор.
 , (12)
, (12)
где Mтор – требуемый тормозной момент для остановки привода за заданное время, Нм;
tтор – заданное время остановки привода, сек.
На основании полученных данных определяется пиковая тормозная мощность, обеспечивающая необходимый момент торможения:
 , (13)
, (13)
где Pпик. тор – пиковая тормозная мощность, Вт.
Затем определяется пиковая мощность тормозного резистора из условия:
где Pпик. тор. р – пиковая мощность тормозного резистора, Вт
Исходными данными для расчета самостоятельно изготавливаемого тормозного резистора могут служить следующие данные:
· уровень напряжения включения тормозного резистора для инверторов класса 400В равен 750В;
· допустимое сопротивление тормозного резистора обычно указывается в технических данных на инвертор, при отсутствии этих данных рассчитывается исходя из номинального тока инвертора:
 , (15)
, (15)
где Rтор. р – сопротивление тормозного резистора, Ом;
Iном. – номинальный ток инвертора, А.
Пиковая мощность тормозного резистора: Pтор. р = RI2ном.
Конструкция самодельного резистора должна обеспечивать длительное рассеивание мощности, составляющей не менее 0,1 Pпик. тор.
При этом может оказаться, что полученное значение сопротивления не обеспечивает необходимую мощность торможения Pпик. тор. р > Pпик. тор. Это означает, что мощности данного инвертора недостаточно для реализации торможения за заданное время (ограничение по току). В этом случае, необходимо или дополнительно устанавливать блоки торможения (если привод удовлетворяет требованиям по разгону и работе в установившемся режиме), или увеличивать мощность инвертора до уровня тока, который обеспечивает необходимую мощность торможения.
При использовании инверторов фирмы КЕВ тормозной резистор проще всего выбрать из типового ряда. Маркировка, как резистора, так и инвертора, содержит в себе одинаковый номер, соответствующий типоразмеру (габариту) мощности привода.
Если мощность резистора Pпик. тор. р (по расчету или в результате выбора из типового ряда) достаточна для обеспечения торможения, можно рассчитать минимально возможное время замедления привода с данным тормозным резистором:

 , (16)
, (16)
где tтор. min – мин. время торможения при использовании тормозного резистора, сек.
Условием корректности расчета минимального времени торможения является выполнение соотношения:
 . (17)
. (17)
При работе с тормозным резистором необходимо учитывать фактор допустимой цикличности торможения, чтобы не допустить перегрева встроенного тормозного транзистора и установленного тормозного резистора. Для стандартного комплекта привода КЕВ максимальная допустимая цикличность торможения составляет 40% при базовом времени цикла 120 сек (цикл работы привода: разгон — работа в установившемся режиме — торможение — отключение). Т. е., привод не должен находиться в режиме торможения более 40 сек в течение 120 сек. работы.
Таким образом, порядок выбора привода следующий:
1. Определение расчетной мощности двигателя по эффективному моменту нагрузки.
2. Проверка выбранного двигателя по перегрузочной способности привода.
3. Динамический расчет привода (определяется расчет времени разгона и расчет времени торможения).
При невыполнении заданных характеристик, выбирается либо инвертор, либо весь привод большей мощности и проводится повторный расчет.
3. ПРИМЕРНЫЙ РАСЧЕТ ЭЛЕКТРИЧЕСКОГО ПРИВОДА И
ОПРЕДЕЛЕНИЕ ЕГО ДИНАМИЧЕСКИХ СВОЙСТВ
Задача. Работа электрического привода характеризуется следующими данными:
1) нагрузочная диаграмма (рис. 1):
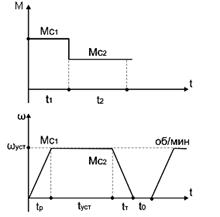
Рис. 1. Нагрузочная диаграмма
2) тахограмма уст=140рад/сек (n=140 9,55=1337)
уст=140рад/сек (n=140 9,55=1337)
время установившегося движения – tуст=77с;
время останова (паузы) tо=10с.
3) приведенный момент инерции: J=0,8кгм2.
Необходимо: определить мощность двигателя произвести выбор двигателя и произвести динамический расчет привода.
1. Определение расчетной мощности двигателя.
1.1. Определяется расчетный момент Мрасч двигателя:
где Мсэ – эквивалентный момент нагрузки;
kз – коэффициент запаса учитывающий динамические режимы электрического двигателя когда он работает с повышенными токами и моментами.(принимаем kз = 1,2).
Мрасч = kзМсэ = 1,2
1.2. Определяется расчетная мощность двигателя:
Ррасч = Мрасч∙расч
Принимается расч = уст, тогда:
Ррасч = Мрасч∙уст = 28,7∙140 = 4018 Вт.
По каталогу выбирается двигатель с ближайшими большими значениями мощности и скорости, т. е. Рн. дв. ≥ Ррасч и н. дв ≥ уст
уст =  ; nуст. = 1337 об/мин.
; nуст. = 1337 об/мин.
Выбирается электродвигатель типа 4А112М4: Рн = 5,5кВт, nн = 1450об/мин,  = 87%, cos = 0.85, Iн = 11,3А.
= 87%, cos = 0.85, Iн = 11,3А.
 1 =
1 = = 7, м =
= 7, м = = 3, мп =
= 3, мп = ,
,
где I – коэффициент нагрузки по току;
м – коэффициент нагрузки по моменту;
мп – коэффициент нагрузки по пусковому моменту.
Jр – момент инерции ротора.
2. Проверка выбранного двигателя по перегрузочной способности привода.
Производится проверка по перегрузке (учет требуемой динамики, т. е. Мдин разгона и Мдин торможения).
2.1. Рассчитывается Мдин. р=J∙2π f∙Nуст /60tр=J∙уст /tр= 8∙140/8 = 14 нм.
2.2. Рассчитывается Мдин. т = — J∙уст/ tр= 0,8∙140/8 = -14 нм.
2.3. Момент двигателя на участке разбега:
Мдин. т = Мс1+ Мдин. р = 40+14 = 54 нм.
2.4. Момент двигателя на участке торможения:
Мт = Мс1+ Мдин. т = 15-14 = -1 нм.
2.5. Момент двигателя на участках установившегося движения (когда н=уст) равны Мс1 и Мс2, т. е. Муст1 = Мс1 и Муст2 = Мс2, так как Мдин=0.
2.6. Эффективный момент нагрузки:
Мэфф=

2.7. Определяется Рэфф.= Мэф.∙уст = 25,7∙140 = 3749 Вт.
2.8. Определяется Мн. дв. = .
.
Учитывая, что н =  =
= =
=  = 151,8 рад/сек, то
= 151,8 рад/сек, то


С учетом снижения питающего напряжения на 10% (вводится поправочный коэффициент = 0,85):
М’н. дв = 36,2∙0,85 = 30,77 ≈ 31 нм.
2.8. Производится уточненный выбор двигателя по условию:
Условие выполняется, т. е. двигатель соответствует требованиям по перегрузке и условиям пуска.
3. Динамический расчет привода.
Производится динамический расчет выбранного электрического привода.
Источник



