
О приводе постоянного тока
Устройство двигателей постоянного тока
Двигатель постоянного тока (ДПТ) является электрической машиной, преобразующей электрическую энергию в механическую для осуществления технологических процессов в различных областях человеческой деятельности. Основными применениями в промышленности для ДПТ являются процессы, в которых необходимо поддерживать и регулировать скорость вращения вала двигателя независимо от величины нагрузки, например, в металлургии, станкостроении.
В соответствии с принципом действия, двигатели постоянного тока имеют три основных функциональных элемента: магнитную систему с постоянным или регулируемым магнитным полем, обмотку, в которой происходит преобразование энергии и расположенную на вращающейся части двигателя (якоре), и щеточно-коллекторный узел, преобразующий знакопостоянное напряжение на внешних зажимах в переменную ЭДС обмотки якоря.
Магнитная система двигателей постоянного тока включает в себя станину, главные полюса и якорь. Магнитная система может быть с постоянными магнитами и с электромагнитами. Массовое применение в промышленности нашли ДПТ с электромагнитами. Ниже речь идет о таких двигателях.
Станина имеет вид полого цилиндра и выполняется из чугуна или стали.
Главные полюса имеют вид буквы «Т» с вогнутой северху горизонтальной частью, повторяющей форму цилиндрического ротора. Причем эта часть называется полюсным наконечником, а вертикальная ножка – сердечником. На сердечнике наматывается обмотка возбуждения. Главные полюса выполняются шихтованными и набираются из листовой электротехнической стали толщиной в доли миллиметра. Они расположены внутри станины и прикреплены к ней с помощью болтов. Для повышения энергоэффективности и улучшения КПД станина и полюса могут выполняться шихтованными и представлять собой набор фасонных пластин.
Якорь имеет вид цилиндра и выполняется шихтованным. Пакет стали якоря напрессовывается на вал. По наружной цилиндрической поверхности якоря выполняются пазы, в которые укладываются проводники обмотки якоря.
Коллектор имеет вид цилиндра, набранного из медных пластин трапецеидального сечения. К пластинам припаиваются или привариваются концы секций обмотки якоря. Щетки представляют собой прямоугольные параллелепипеды и выполняются из проводящих материалов на основе графита. Щетки закреплены на станине и соединены электрически с выводами, расположенными в коробке на корпусе двигателя.
Двигатели постоянного тока бывают с независимым, последовательным, параллельным и смешанным возбуждением. Примером ДПТ с независимым возбуждением являются двигатели серий MM и MAG производства MAGNETIC.
Способы регулирования скорости ДПТ с независимым возбуждением
На рис. 1… 3 представлены электромеханические характеристики двигателя постоянного тока с независимым возбуждением – зависимость скорости вращения от тока якоря. Распространенной задачей при выполнении технологических операций является регулирование скорости ДПТ. Скорость двигателя постоянного тока с независимым возбуждением может регулироваться следующими тремя способами:
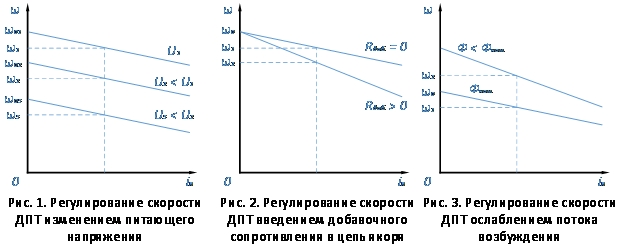
1. Изменение питающего напряжения позволяет изменить скорость идеального холостого хода, не меняя наклона электромеханической характеристики. При этом способе электромеханическая характеристика смещается параллельно самой себе, обеспечивая наибольший диапазон регулирования и наилучшие энергетические характеристики. Для изменения напряжения якоря нужен источник регулируемого напряжения.
2. Изменение сопротивления якорной цепи добавлением последовательно включенного реостата изменяет наклон характеристики при сохранении скорости идеального холостого хода. Данный способ вытесняется первым в связи со ступенчатостью регулирования и низкими энергетическими характеристиками из-за рассеивания энергии в сопротивлении реостата.
3. Увеличение магнитного потока вызывает насыщение магнитной системы, поэтому не применяется. Ослабление магнитного потока вызывает увеличение скорости идеального холостого хода и может быть использовано для работы на низких моментах нагрузки. Преимуществом регулирования тока возбуждения является то, что величина этого тока на двигателях средней и большой мощности в десятки раз меньше тока якоря, что позволяет использовать для регулирования скорости приводы меньшей мощности. Однако, диапазон регулирования скорости при этом способе меньше, чем при первом. Ослабление магнитного потока используют для расширения диапазона регулирования скорости совместно с изменением питающего напряжения.
Устройства для регулирования скорости ДПТ
Для регулирования скорости ДПТ разработаны различные электронные устройства, выполняющие не только основную задачу, но и обеспечивающие дополнительный функционал: защиты двигателя, автоматическую настройку под конкретный двигатель, измерение параметров, контроль режимов, выдачу предупредительной и аварийной сигнализации, управление вспомогательными устройствами. Хорошо освоенными являются тиристорные приводы с аналоговой или цифровой управляющей частью. Примерами первых являются приводы SLE, вторых – PL (двухквадрантный) и PLX (четырехквадрантный) производства Sprint-Electric.
Применение аналоговой управляющей части обеспечивает экономически эффективное решение для простых применений, где не требуется реверса двигателя приводного механизма. В этом случае импульсы управления формируются на основании сигналов задания и обратной связи, проходящих только через аналоговый тракт привода. Похожим образом обрабатываются сигналы для различных защит двигателя. Быстродействие привода обусловливается постоянными времени внутренних фильтров сигнала, а отсутствие встроенной программы позволяет использовать его в приложениях с повышенными требованиями к надежности.
Цифровая управляющая часть добавляет функционал, но и цена привода увеличивается. В этом случае обработку внешних сигналов в цифровой форме выполняет встроенный контроллер с интегрированным программным обеспечением, которое может быть более гибко сконфигурировано под конкретную задачу. Зачастую производители совершенствуют программное обеспечение своих изделий, выпуская так называемые «прошивки», расширяющие функционал готовых устройств. В аналоговых приводах расширить функционал готового устройства можно только изменением внешнего по отношению к приводу оборудования.
Типы датчиков обратной связи по скорости
Для регулирования скорости служат так называемые датчики обратной связи. Сигнал с них при необходимости заводится в привод, представляя реальную скорость механизма. Это позволяет системе управления внести коррекцию в работу привода в случае отклонения желаемой скорости от заданной. Датчики скорости бывают аналоговыми, цифровыми и аналого-цифровыми или комбинированными.
Аналоговые датчики скорости – это тахогенераторы и резольверы. Тахогенератор представляет собой электрическую машину постоянного тока, ЭДС которой в рабочем диапазоне параметров пропорциональна скорости вращения вала. Внешнее питание тахогенератору не требуется. Резольвер является вращающимся трансформатором, амплитуда выходного напряжения которого зависит от входного напряжения и угла поворота ротора.
Цифровые датчики положения (энкодеры), используемые в качестве датчиков скорости, могут быть абсолютными и относительными. Абсолютные энкодеры и при пропадании и последующем восстановлении питания позволяют узнать текущее положение ротора. Относительные (инкрементальные) энкодеры позволяют определить только относительное положение при вращении ротора, выходным сигналом относительного энкодера являются два сдвинутых на четверть периода импульса и импульс нулевого положения. Сдвиг на четверть периода позволяет определить направление вращения, а импульс нулевого положения используется, например, для подсчета числа оборотов.
Абсолютные энкодеры бывают с выходным протоколом, который позволяет, кроме получения информации о положении ротора, изменять характеристики энкодера, проводить его диагностику и калибровку. Различными производителями поддерживается часть или все из представленных протоколов: SSI, BiSS interface, ISI, Profibus, Profinet, Ethernet Powerlink, EtherNet TCP/IP, Modbus, DeviceNet, CANopen, EtherCAT, Endat and Hiperface. Наиболее распространены SSI и Endat.
Комбинированные энкодеры помимо сигналов протокола выдают также импульсы относительного положения или сигналы фаз для работы сервосистем.
Построение системы управления двигателем постоянного тока на базе PL\PLX
Рассмотрим пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX. На рис. 4 представлена схема подключения.
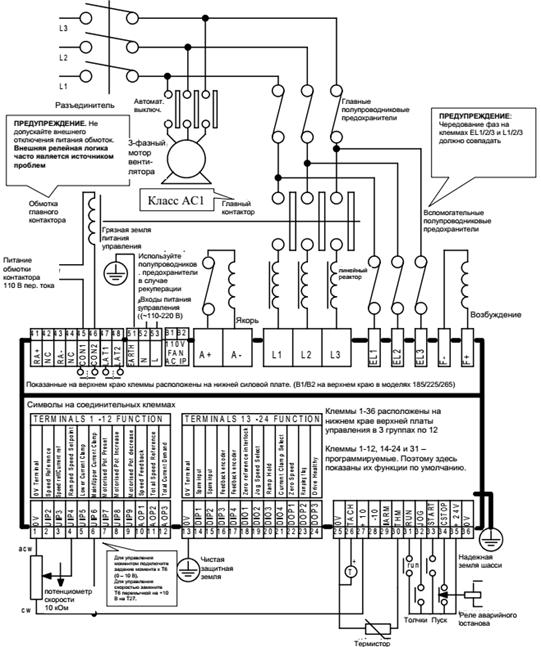
Рис. 4. Пример построения системы управления ДПТ на примере привода постоянного тока PL\PLX
Основными компонентами системы управления ДПТ являются:
1.Привод постоянного тока, который обеспечивает регулирование тока якоря, скорости двигателя, защиты двигателя, управление внешними цепями и обеспечение возбуждения. Существет набор программных функциональных блоков, позволяющих гибко настроить привод под конкретные применения. Привод может быть оснащен модулями поддержки распространенных сетевых протоколов и поддерживает различные типы сигналов обратной связи. При пусконаладке и диагностике устройств на базе PL\PLX удобно использовать встроенную систему диагностики и осциллограф.
2.Главный контактор, назначение которого — физическое отсоединение якоря двигателя от источника питания. К контактору и его цепям управления предъявляются следующие требования: должна быть возможность отключения контактора без использования электроники, контактор не должен размыкать ток и цепь управления контактора должна соответствовать всем требованиям конкретной электроустановки. Блоки PL и PLX спроектированы для выполнения всех этих правил управления главным контактором. Обмотка реле подключена непосредственно к клемме CSTOP (останов по выбегу) T34 и зашунтирована конденсатором, в результате время отключения составляет около 100 миллисекунд. За счет этого у PL\PLX есть время снизить ток якоря до нуля перед размыканием контактов. Убедитесь, что обмотка контактора оснащена гасящим устройством.
3.Главные полупроводниковые предохранители. Они служат для защиты сети от пробоя тиристоров и для защиты привода от замыкания на стороне выпрямленного напряжения. Предохранители в цепи якоря нужны для защиты привода, у которого есть возможность рекуперации энергии в сеть – PLX. Необходимо учитывать рекомендации по приводам для правильного выбора предохранителей по величине I²T.
4.Линейный реактор, который сглаживает ток и уменьшает гармонические искажения напряжения питающей сети. Кроме того, индуктивность реактора позволяет компенсировать низкую индуктивность обмотки якоря и улучшить таким образом коммутацию тиристоров. Еще одной немаловажной функцией реактора является ограничение тока при коротких замыканиях на стороне якоря.
Распространенные вопросы при проектировании систем с приводами постоянного тока
1.Можно ли размыкать цепь питания катушки управления главного контактора кнопкой аварийного останова?
— Нет. Важно, чтобы привод сам контролировал главный контактор и не было другого внешнего воздействия на эту цепь. Аварийный останов должен быть подключен к клемме 34, останов выбегом (coast stop). Однако, если местные указания безопасности требуют необходимости разрыва цепи питания катушки главного контактора кнопкой аварийного останова, необходимо по крайней мере подать сигнал с блок-контакта контактора на клемму 31, пуск (run), чтобы привод имел возможность снизить ток перед отключением питания силового моста.
2.Необходимо ли использовать полупроводниковые предохранители?
— Безусловно, да. Это единственный способ защитить мост привода в случае сбоя в любом месте системы, и это гарантийное условие для привода. На рынке существуют определенные типы выключателей, которые, как утверждается, достаточно быстры для защиты полупроводников, но нам еще предстоит найти тот, который обеспечивает такую же защиту, как и корректно подобранный предохранитель. Стоит отметить, что максимальный номинальный ток предохранителя имеет второстепенное значение, в то время как он довольно велик, — предел тока привода и алгоритм блокировки достаточно сложны, чтобы защитить от повреждения при длительной перегрузке. Важной характеристикой предохранителей является величина I²T. Выраженный в A²с (амперы в квадрате, помноженные на секунды), это мера пропускания энергии, и максимально допустимое значение для любого привода приведено в таблице номиналов предохранителей в руководстве на привод. По сути, если величина I²T не указана в спецификации производителя плавких предохранителей, они вряд ли будут достаточными, даже если в описании производителя используется альтернативное имя, такое как «сверхбыстрый». Предохранитель по стороне переменного тока является обязательным во всех случаях, в то время как предохранители по стороне постоянного тока необходимо устанавливать только в системах, где возможна рекуперация энергии в сеть. Что касается предохранителей в цепи постоянного тока, следует соблюдать особую осторожность, т.к. применение для этих цепей предохранителей переменного тока даже с правильным значением I²T недопустимо.
3.Как сделать ослабление поля?
— Этот вопрос обычно сопровождается утверждением о том, что он оказался трудным и / или занимающим много времени на старых приводах. С цифровым приводом это сделать просто. Если вы правильно установили параметры BASE SPEED и TOP SPEED в CHANGE PARAMETERS, CALIBRATION и помните, что вы должны использовать либо тахогенератор, либо обратную связь с энкодером (ослабление поля не может работать только с обратной связью напряжения якоря), все, что вам нужно сделать, это перейти к CHANGE PARAMETERS, FIELD CONTROL, FIELD WEAKENING MENU, FIELD WEAKENING ENABLE и установить его в ENABLED. Этого будет достаточно в большинстве случаев. Для некоторых двигателей требуется профилирование тока якоря, чтобы улучшить коммутацию в области слабого поля, эту информацию следует запрашивать у производителей двигателей. Относящиеся к этому случаю параметры находятся в CHANGE PARAMETERS, CURRENT CONTROL, I DYNAMIC PROFILE.
Ведущий технический специалист ООО «Драйвика» Образцов П.С.
Источник
Система управления приводом постоянного тока
Приводы постоянного тока служат для управления двигателями постоянного тока. Правда не везде, а лишь там, где требуется плавное и точное регулирование скорости и вращающего момента электромотора в достаточно широких пределах.
Где же конкретно могут использоваться приводы постоянного тока? Для того, чтобы ответить на данный вопрос, нам надо вначале сказать несколько слов о принципе работы двигателя постоянного тока.
Вообще надо заметить, что электродвигатели — очень распространенный объект управления в различных устройствах и технических системах. Причем настолько, что без них вся наша современная жизнь очевидно вовсе не была бы такой уж и современной. Точнее мы бы так и не ушли далее технологий начала 19 века. И не имели бы не только компьютеров, с их гаджетами, но и вообще не знали бы, например, даже столь привычного нам электрического освещения, поскольку сами электрогенераторы – это, по сути, те же самые электродвигатели, но только преобразующие различные виды неэлектрической энергии (механическая, химическая или тепловая) в электрическую энергию.
Сами электродвигатели при этом, как известно, делятся на электродвигатели постоянного тока и электродвигатели переменного тока. Причем сегодня в силу бурного развития научно-технической мысли, которая предлагает более совершенные алгоритмы векторного управления и довольно дешевые и удобные в использовании частотники, именно последние приобретают все большую популярность в промышленности.
Однако, нельзя не сказать, что и двигатели постоянного тока рано еще списывать со счетов. Они имеют свои весьма важные и существенные преимущества. Дело в том, что один из «глобальных» минусов двигателя постоянного тока – это коллектор, его низкая механическая прочность, а также слабая механическая прочность щеток.
Но зато у двигателя постоянного тока можно менять скорости в достаточно широком диапазоне при относительном постоянстве момента на валу. При этом количество оборотов двигателя постоянного тока пропорционально величине напряжения, которое подается на якорную обмотку. А это значит, что в диапазоне скоростей от нуля до номинального значения электродвигатель может развивать полный крутящий момент. Именно поэтому двигатель постоянного тока широко используют в тех случаях, когда необходимо обеспечить большой момент при низких скоростях электродвигателя почти до его остановки при наличии полной нагрузки с последующим стартом. К таковым областям относятся электроприводы лифтов, кранов, ленточных конвейеров, смесителей, экструдеров и топу подобных механизмов.
Принцип действия двигателя постоянного тока
Вообще надо заметить, что самой первой из всех изобретенных в XIX веке вращающихся электромашин был именно электродвигатель постоянного тока. Сам принцип действия его известен с середины прошлого столетия и основан на том, что крутящий момент здесь создаётся путём взаимодействия между двумя магнитными полями — полем обмотки возбуждения и полем, создающимся обмотками во вращающемся якоре.
Впрочем, в некоторых моделях двигателей постоянного тока нет обмотки возбуждения, вместо нее установлены постоянные магниты, сохраняющее стационарное магнитное поле при любых рабочих условиях.
Принцип работы двигателя постоянного тока заключается в том, что ток, проходя через якорь, создаёт магнитное поле, которое пытается выровняться со стационарным полем. Происходит вращение двигателя/

Рис. 1. Схема двигателя постоянного тока
При этом коллектор (так называется набор сегментированных медных планок), разрывает электрический контакт с уже «выровненной» обмоткой и возбуждает другую обмотку (или как в простом примере, показанном выше, перевозбуждает ту же цепь в противоположном направлении), создавая другое не выровненное магнитное поле, которое продолжает вращать якорь. Электрический контакт между вращающимися сегментами коллектора и стационарным источником питания в этом случае происходит через угольные щетки. Поскольку здесь постоянно имеет место механическое трение, то эти щетки изнашиваются через определенное время (как и сам коллектор) и соответственно требуют своей периодической замены.
Впрочем, следует заметить, что большинство промышленных электродвигателей постоянного тока изготавливаются с несколькими обмотками якоря, а не с одной, как показано на упрощенной иллюстрации сверху.
В электродвигателях постоянного тока проявляются следующие отношения между механическими и электрическими величинами:
- Крутящий момент. Он прямо пропорционален силе магнитного поля якоря, которая, в свою очередь, прямо пропорциональна току, проходящему через обмотки якоря. Так же момент прямо пропорционален силе постоянного магнитного поля, которое, в свою очередь, прямо пропорционально току, проходящему через возбуждающую обмотку (в двигателе без магнитов).
- Скорость. Скорость ограничена ЭДС, генерируемой якорем при вращении в постоянном магнитном поле. Эта ЭДС прямо пропорциональна скорости вращения якоря, и также прямо пропорциональна силе постоянного магнитного поля (которая прямо пропорциональна току возбуждающей обмотки в электродвигателе без магнитов). Это значит, что скорость прямо пропорциональна напряжению якоря, а также обратно пропорциональна силе постоянного магнитного поля, которая прямо пропорциональна току, проходящему через возбуждающие обмотки (в двигателе без магнитов).
Управление двигателем постоянного тока
Последнее же означает, что, меняя тока обмотки, можно изменять соотношение между скоростью и моментом. Однако этого недостаточно для управления общей мощностью двигателя. Чтобы управлять выходной мощностью электродвигателя постоянного тока также необходимо управлять напряжением и током якоря. Для этой цели можно было бы использовать переменные резисторы, но этот метод не используется в настоящее время, так как приводит к потере мощности. Лучшим решением здесь будет применение электронной схемы регулирования мощности на транзисторных ключах быстро отключающих и включающих якорь двигателя в цепь. Такой тип управления называется широтно-импульсной модуляцией, или ШИМ.

Рис.2. Схема управления скоростью и моментом ДПТ
По традиционной технологии для импульсного питания двигателя постоянного тока используют схему управляемого выпрямителя, в котором для преобразования переменного тока в постоянный вместо обычных выпрямляющих диодов используют тиристоры (управляемая схема Ларионова). Основным источником питания промышленных двигателей постоянного тока остается переменный ток, и этот переменный ток должен быть преобразован в постоянный в некотором узле системы; управление имеет смысл интегрировать прямо в этот выпрямительный узел.

Рис.3. Схема управляемого выпрямителя
Схема управляемого выпрямителя работает по принципу изменения времени «пускового» импульса относительно импульсов колебаний переменного тока. Чем раньше в каждом периоде переменного тока откроется тиристор, тем дольше он будет пропускать ток к двигателю. Схема фазового управления отвечает за генерацию импульсов и их длительность.
Отсюда следует, что привод постоянного тока просто регулирующий подводимую мощность к двигателю был бы трудно регулируемым и не применим в большинстве задач. Для управления двигателем необходимо управлять скоростью. Поэтому на двигателях постоянного тока устанавливают тахогенераторы, механически соединённые с валом двигателя.
Тахогенератор представляет собой небольшой генератор, создающий постоянное напряжение, прямо пропорциональное скорости вращения вала, обычно с выходом 0-10В постоянного тока, реже 0-220В переменного тока. По его показаниям регулируемый привод постоянного тока регулирует электрическую мощность, подводимую к двигателю так, чтобы скорость вращения совпала с заданной управляющим сигналом. Имея датчик обратной связи для регулирования скорости, привод постоянного тока точно регулирует скорость вращения двигателем.

Рис. 4. Схема управления двигателем постоянного тока
Менять ли привод постоянного тока?
Следует заметить, что в силу длительного периода широкого применения двигателей постоянного тока, на протяжении довольно долгого времени для регулировки скорости вала двигателя использовались приводы постоянного тока. Тем самым, данные приводы имели широкое распространение и были установлены на огромном количестве различных машин, механизмов и оборудовании. Но вот в чем проблема – дело в том, что раньше приводы постоянного тока выпускались с управлением на аналоговых микросхемах. А это вело к длительной настройке оборудования, необходимости постоянного обслуживания привода и частой его перенастройки. В результате против двигателей постоянного тока и соответственно приводов постоянного тока сложилось предубеждение о ненужности и даже вредности установки таких систем. Повсеместно обозначилась тенденция к замене «постоянников» на «переменники». И где-то это и правда оказалось оправдано, но…
Увы, но часто «дьявол кроется в деталях»!
Следует заметить, что сейчас приводы постоянного тока выпускаются с фазными схемами управления, основанными на современных микропроцессорах. А это значит, что они стали значительно более надежны и, ГЛАВНОЕ, не нуждаются в необходимости постоянного обслуживания привода и частой перенастройки приводов. А поскольку вопреки публикациям в СМИ и доводам производителей приводов переменного тока, существует еще немало таких применений, где приводы постоянного тока являются предпочтительными по своему функционалу (а в конечном счете и по деньгам), то возможно при модернизации оборудования следует обратить внимание на приводы постоянного тока.
Более того, сегодня необходимо учитывать, что очень часто, при модернизации систем управления, простая замена устаревших приводов постоянного тока новыми современными приводами постоянного тока, является экономически более выгодной!
Подумайте! Возможно это Ваш случай? Причем в данном случае имеет смысл обратить именно на лидеров по производству приводов постоянного тока, одним из которых является фирма Siemens, выпускающая приводы постоянного тока серии SINAMICS DCM — современный мощный привод постоянного тока со многими дополнительными модулями расширения, интеграции в промышленные сети и встроенными функциями для решения типовых технологических задач (намотка-размотка и т. д.).
Источник



