
Рулевые приводы и передачи
 Рулевые приводы. Для передачи усилия рулевого двигателя баллеру или обеспечения поворота руля вручную применяются рулевые приводы, типы и конструкции которых определяются в основном размерами судна и расположением рулевого двигателя.
Рулевые приводы. Для передачи усилия рулевого двигателя баллеру или обеспечения поворота руля вручную применяются рулевые приводы, типы и конструкции которых определяются в основном размерами судна и расположением рулевого двигателя.
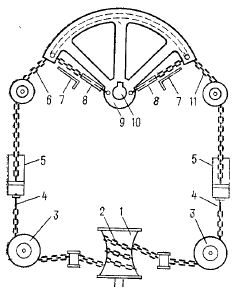
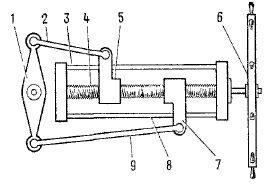
Секторный рулевой привод со штуртросом (рис. 62) встречается только на небольших судах. Перекладка руля осуществляется вручную штурвалом или рулевым двигателем при помощи штуртросовой передачи и сектора. На барабан 1 штурвала или двигателя намотано несколько шлагов короткозвенной цепи 2.
Ее концы, проведенные через направляющие блоки — роульсы 3, присоединены к стальным штангам 4, проложенным по палубе на роликах или деревянных вкладышах. Концы штанг присоединены к корпусам жестких стальных пружин — амортизаторов 5. На головке баллера 10 жестко закреплена ступица сектора 9, имеющего на ободе два желоба для штуртросной цепи.
Цепи 6 и 11 одними концами присоединены к шайбам, сжимающим пружины, а другими — проведены через направляющие роульсы по желобам сектора и присоединены соответственно к талрепам 8, закрепленным на ступице. Талрепы служат для обтягивания штуртроса.
Перекладка руля на угол более 35° ограничивается приваренными к палубе кницами 7. В местах прохода по грузовой палубе штуртрос защищен металлическим кожухом. При повороте барабана штурвалом или рулевым двигателем одна ветвь штуртроса ослабляется, а другая выбивается, сектор разворачивается и поворачивает баллер.
Секторный привод со штуртросом имеет существенные недостатки: сложная и громоздкая проводка штуртроса, быстрый износ цепи и других трущихся частей, неудобство ухода за ним при перевозке палубного груза и др.
рис. 63 Секторно-румпельный привод
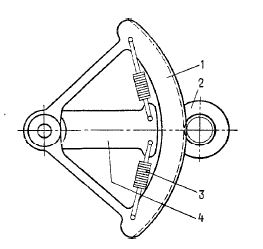
Поэтому более широкое применение получили секторно- румпельные приводы (рис. 63) с рулевым двигателем, установленным вблизи от сектора руля. Сектор, свободно насаженный на баллер, имеет зубчатый обод 1, входящий в зацепление с зубчатой шестерней 2 рулевого двигателя. Через буферные пружины — амортизаторы 3 сектор связан с румпелем 4, жестко насаженным на головку баллера.
Перекладка руля осуществляется рулевым электродвигателем, который поворачивает сектор, а он через пружины поворачивает румпель и баллер руля. Электрогидравлические рулевые приводы получили широкое применение на судах любого тоннажа.
Такой привод в комплексе с электродвигателем представляет собой электрогидравлическую рулевую машину. На судах обычно устанавливаются плунжерные двух- или четырехцилиндровые электрогидравлические машины.
рис. 64 Схема двухцилиндровой рулевой машины
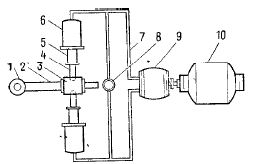
Схема устройства двухцилиндровой рулевой машины довольно проста (рис. 64). На головку баллера руля 1 жестко насажен румпель 2, на котором установлен ползун 3, имеющий с боков сферические углубления. В них входят и свободно упираются штоки 4 от плунжеров 5 двух гидроцилиндров 6. Цилиндры соединены трубопроводами 7 с насосом 9, который приводится в действие электромотором 10 Вся система заполняется маслом.
При работе электромотора насос отсасывает масло из одного цилиндра и нагнетает в другой, в результате чего плунжер цилиндра, находящегося под давлением, своим штоком давит на ползун и через него поворачивает румпель и баллер руля. Оба цилиндра соединяются между собой дополнительным трубопроводом с перепускным клапаном 8, который является амортизатором.
При ударах волн о перо руля давление в одном из цилиндров повышается, перепускной клапан открывается и перепускает часть масла в другой цилиндр. Кроме электрогидравлического привода плунжерного типа, нашли применение лопастные и винтовые гидравлические приводы.
Для удержания пера руля в фиксированном положении на случай ремонта или перехода с одного привода на другой рулевое устройство имеет стопоры. В гидравлических приводах стопорение руля обеспечивается перекрытием масляных трубопроводов при помощи специальных клапанов.
Ручные рулевые приводы (гидравлические, секторные с валиковой передачей и винтовые) применяются как, запасные или аварийные. Широкое применение на судах получил ручной поперечно-румпельный с винтовым механизмом перекладки руля привод Дэвиса.
рис. 65 Винтовой рулевой привод Дэвиса
Привод Дэвиса (рис. 65) устанавливается в румпельном отделении в непосредственной близости от румпеля. Винтовой шпиндель 4, приводимый во вращение штурвалом 6, имеет на одной половине винта правую нарезку, на другой левую. На шпиндель навинчены два ползуна 5 и 7, имеющих в приливах отверстия, через которые проходят гладкие направляющие стержни 3 и 8, укрепленные в станине. Стержни обеспечивают перемещение ползунов вдоль шпинделя без перекосов.
Стальными тягами 2 и 9 ползуны соединены с поперечным румпелем 1, жестко насаженным на головку баллера. При вращении штурвала ползуны перемещаются по шпинделю в разные стороны и через тяги поворачивают румпель. Винтовой привод повышает усилие, передаваемое от штурвала на баллер, в 25 — 30 раз.
Рулевые передачи. Существуют механические1 (валиковые, штуртросовые, стержневые и др.), гидравлические и электрические рулевые передачи.
Гидравлическая передача применяется для управления пусковым устройством электрогидравлического рулевого привода. Она представляет собой систему из поршневого насоса, приемника гидравлической передачи — цилиндра и тонких медных трубок, соединяющих между собой соответствующие полости цилиндров насоса, и приемника.
Поршень насоса получает движение от штурвала, с которым он связан непосредственно, а поршень цилиндра приемника связан через тяги с пусковым устройством гидравлического рулевого привода. Вся система цилиндров и трубопроводов заполнена незамерзающей смесью воды с глицерином или минеральным маслом.
Поворот штурвала приводит в движение поршень насоса, который сжимает рабочую жидкость в одной из полостей, в результате чего поршень приемника перемещается и через тяги вводит в действие электрогидравлический рулевой привод.
Электрическая передача, как наиболее совершенная, получила широкое применение в судовых рулевых устройствах. Она предназначена для дистанционного управления рулевым электродвигателем. В зависимости от устройства последнего на судах применяются различные схемы электрической передачи. Подробное описание схем и инструкция по обслуживанию передачи приводится в технической документации рулевого устройства.
Источник
Судовая рулевая машина
К важнейшим вспомогательным механизмам любого судна относится рулевая машина, входящая в комплекс узлов, механизмов и агрегатов, составляющих рулевое устройство катера или корабля.
Судовая рулевая машина выполняет функцию обеспечения управляемости корабля, придерживание судном заданного курса, эффективное маневрирование.
Назначение и принцип работы рулевых судовых машин
В состав корабельного рулевого устройства входят:
Руль (перо руля, штурвал или направляющая поворотная насадка руля), представляющий собой сам рабочий орган, к которому прилагается воздействие управляющего.
Баллер – элемент, служащий для соединения руля с рулевым приводом.
Рулевой привод – механизм для передачи усилия от рулевой машины к рулю.
Судовая рулевая машина – механизм, обеспечивающий усилие, необходимое для поворота баллера, а затем и руля на заданный угол для удержания требуемого курса или совершения маневра.
Привод – узел, связывающий пост управления с рулевой машиной посредством гидравлической или механической передачи.
Двигатель рулевого привода – может быть паровым (на современных судах не устанавливается) и электрическим.
Современные судовые рулевые машины имеют привод от электродвигателя. Различия заключаются в типе передачи.
При механической передаче усилия от электродвигателя к рулевой машине такой тип машин называют электрическими. Гидравлическая передача свойственна гидравлическим машинам рулевым.
Рулевые машины судовые – основные предъявляемые требования
Исходя из назначения и места установки видно, что рулевые машины судовые выступают ключевыми, важными и ответственными элементами рулевого устройства корабля, потому к ним предъявляются строгие требования относительно обеспечения:
надежности работы и живучести с учетом сложных условий эксплуатации судна (влага, температурные колебания, динамические нагрузки и пр.);
безопасности управления для человека;
установку и поддержание задаваемого оператором угла и скорости перекладки руля при движении корабля в диапазоне максимальных развиваемых скоростей (в связи с этим устройство комплектуется специальными тормозами);
максимальной компактности габаритов и небольшой массы;
возможности удаленного управления, например, из разных мест и быстрого эффективного перехода между основной и вспомогательными рулевыми точками.
Преимущества и особенности рулевых судовых машин
Гидравлические рулевые машины судовые находят применение на новых судах, так как способны обеспечить более высокие крутящие моменты, плавное изменение скорости, бесшумность, защиту от перегрузок. Также они отличаются компактностью, небольшой массой и высоким КПД.
Электрические (электромеханические) варианты считаются устаревшими, маломощными, с невысоким КПД, однако ими все еще могут комплектоваться небольшие речные и смешанного плавания суда. Такие машины более дешевы, но более капризны.
Источник
Глава 2. Рулевые электроприводы.
1. Назначение и классификация рулевых приводов.
Под рулевым приводом принято понимать механизм для передачи движения к рулю. Рулевые приводы можно разделить по ряду признаков.
По назначению привод может быть основным, запасным и аварийным.
В зависимости от рода используемой энергии различают ручной и электрифицированный привод.
По принципу управления электрифицированные приводы разделяют на три типа :
— простого дистанционного действия, осуществляемого посредством кнопок, педалей или рычагов, положение которых не соответствует положению пера руля;
— следящего действия, осуществляемого с помощью рычагов и штурвала, положение которых строго соответствует положению пера руля;
— автоматического действия, выполняющие автоматическую стабилизацию судна на курсе, автоматический переход на новый курс и программное управление курсом по наперед заданному закону. Автоматические системы имеют резервное управление простого и следящего типов.
По типу передаточного механизма привод можно разделить на две группы:
— с механической передачей – РЭМ приводы;
— с гидравлической передачей – РЭГ приводы.
Рулевые приводы с механической передачей бывают штуртросовые, валиковые, винтовые и секторные.
Штуртросовые Валиковые Винтовые
Рассмотрим принцип действия и устройство секторной рулевой машины.
| 1- перо руля; 2- баллер; 3- румпель; 4- пружина; 5- сектор с зубчатой насечкой; 6- цилиндрическая шестерня; 7- вал; 8- червячная пара; 9- муфта; 10- электродвигатель |
Баллер – вертикальный вал, закрепленный в подшипниках. Снизу к нему крепится перо руля, сверху свободно надевается сектор и жестко, шпонками, крепится румпель. Усилия от сектора к румпелю передается при помощи демпферных пружин, предназначенных для компенсации ударной нагрузки. Между ЭД и сектором стоит редуктор, представленный на чертеже червячной парой и цилиндрической шестерней, находящейся в зацеплении с сектором. Червячная пара – обязательный элемент редуктора, так как с его помощью легче и проще всего сделать передачу самотормозящейся, что требует Регистр. Передача становится самотормозящейся при КПД h 0 ; больший угол перекладки пера руля воспринимается пружиной e — f.
Отечественной промышленностью выпускаются плунжерные гидравлические машины типов Р11 – Р20 с одним или двумя маслеными насосами регулируемой подачи с электроприводом. Указанные машины способны развивать момент на баллере 63 – 1000 кН•м.
2. Требования Правил Российского Речного Регистра к рулевому устройству.
– рулевым устройством должны быть оборудованы все самоходные суда;
– рулевой привод должен обеспечивать непрерывное управление судном в условиях эксплуатации, в том числе при отказе основного привода или отключении основного источника питания;
– перо руля и поворотная насадка не должны выступать за габариты судна;
– расположение руля и поворотной насадки должно исключать их повреждение от удара о грунт, при плавании судна с небольшим расчетным дифферентом на корму.
2). Комплектация рулевых устройств рулевыми приводами.
– рулевое устройство судна должно иметь два привода: основной и запасный. Запасный привод не требуется на судах с несколькими рулями или насадками, приводимыми в действие раздельно управляемыми машинами;
– основной и запасный рулевые приводы должны быть устроены так, чтобы повреждение одного из них не выводило из строя другой. Допускается при этом иметь общие детали силового привода на баллер (румпель, сектор, цилиндровый блок);
– система управления основным рулевым приводом должна быть независимой от системы управления запасным рулевым приводом. Допускается иметь общий штурвал или рукоятку управления;
– запасный рулевой привод должен обеспечивать перекладку руля или поворотной насадки на тот же максимальный угол, что и основной;
– посты управления основным и запасным рулевыми приводами должны быть оборудованы указателями положения руля (поворотной насадки).
– рулевые приводы должны обеспечивать непрерывную работу при постоянном крене до 15 0 и дифференте до 5 0 . Двигатели рулевых приводов должны допускать перегрузку по моменту, равному 1,5 расчетного крутящего момента в течение 1 минуты;
– мощность основного рулевого привода должна быть достаточной для перекладки руля на угол от 35 0 одного борта до 35 0 другого борта за время не более 30 секунд при максимальной скорости переднего хода судна и осадки по грузовую ватерлинию;
– мощность запасного механическогорулевого привода должна быть достаточной для перекладки руля на угол от 20 0 одного борта до 20 0 другого борта за время не более 60 секунд при скорости переднего хода 0,6 наибольшей и осадке его по грузовую ватерлинию;
– рулевой привод должен быть самотормозящейся конструкцией;
– если основной и запасный привод гидравлические, то каждый из этих приводов должен иметь насос с независимым двигателем, а трубопроводы приводов должны быть проложены как можно дальше друг от друга.
4) Электрический привод руля.
4.1 Электрический привод рулевого устройства должен обеспечивать:
– перекладку с борта на борт за время и угол, как указано выше;
– непрерывную перекладку руля с борта на борт в течение 30 минут для каждого агрегата при полностью погруженном руле и максимальной скорости переднего хода;
– возможность стоянки электродвигателя под током в течение 1 минуты с нагретого состояния (только для рулей с непосредственным электрическим приводом);
– начальный пусковой момент двигателя рулевого устройства с непосредственным электрическим приводом должен быть не менее 200 % номинального;
– при ходе судна по курсу не менее 350 включений в час при перекладке руля на 5 – 6 градусов, наибольшей эксплуатационной скорости переднего хода и непрерывной работе в течение 1 часа.
4.2. В схеме управления рулевого электрического привода должны быть предусмотрены конечные выключатели, ограничивающие перекладку руля или насадки на левый и правый борт. При срабатывании одного из них должна обеспечиваться возможность перекладки руля в обратном направлении.
4.3 Пусковые устройства должны обеспечивать повторный автоматический запуск ЭД при восстановлении напряжения после перерыва в подаче питания.
4.4. Для ЭД электрического или электрогидравлического рулевого устройства должно предусматриваться устройство защиты только от токов короткого замыкания.
Защита от минимального напряжения и перегрузки не допускаются. Вместо защиты от перегрузки должна быть установлена сигнализация.
4.5 Автоматические выключатели, защищающие электрические двигатели постоянного тока рулевых устройств от токов короткого замыкания, должны иметь уставки на мгновенное выключение при токе не менее 300 % и не более 400 % номинального тока защищаемого электрического двигателя, а для двигателей переменного тока – уставки на мгновенное выключение при токе более 125 % наибольшего пускового тока защищаемого двигателя.
4.6 У постов управления главными механизмами (при их наличии) и в рулевой рубке у поста управления рулем или в самом пульте управления должны быть устройства, сигнализирующие о наличии напряжения в цепи питания рулевого устройства, его перегрузке и отключении, а для гидравлических систем – по минимальному уровню масла в расходной цистерне.. Сигнал о перегрузке и отключении должен быть световым и звуковым.
5) Питание электрических приводов рулевых устройств.
– основной и запасный рулевые приводы должны получать питание по отдельным фидерам;
– каждый фидер должен быть рассчитан на питание всех электродвигателей, которые подключены к нему и работают одновременно;
– если аварийный источник электрической энергии имеет одинаковые напряжение и род тока с основным источником энергии, то один фидер идет от ГРЩ, второй от АРЩ. Фидеры прокладываются по разным бортам;
– аварийный источник электрической энергии должен обеспечить питание в течение не менее 6 часов пассажирских и грузопассажирских судов класса «М», не менее 3 часов судов класса «О», «Р», «Л»;
– время перехода с основного источника питания на аварийное должно составлять не более 15 секунд.
Рули и поворотные насадки.
3.1. Классификация рулей и поворотных насадок
Рули бывают активные и пассивные.
Активные рули обеспечивают управляемость судна без хода и на малых скоростях, когда обычные рули не эффективны. В их качестве могут применяться:
– перьевые рули с встроенными винтами и электродвигателями;
– поворотные насадки с раздельным управлением;
Пассивные рули обеспечивают управляемость судна на ходу. К ним относятся перьевые рули и поворотные насадки при совместном управлении.
По количеству опор рули бывают подвесные, одноопорные и многоопорные.
По форме контура пера руля различают прямоугольные и произвольной формы, часто повторяющие очертания кормовой оконечности судна.
По расположению оси вращения рули подразделяются на:
Рассмотрим на примере плоских рулей прямоугольной формы:
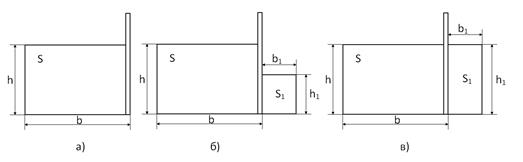
S1 – площадь выступающей части пера руля;
h1 – высота выступающей (балансирной) части пера руля;
b – ширина пера руля – расстояние от набегающей кромки до кормовой оконечности пера руля;
b1 – ширина балансирной части руля – расстояние от набегающей кромки до оси вращения.
Простой руль. Для упрощения расчетов считают, что набегающая кромка пера руля совпадает с осью вращения.
Полубалансирный руль, когда высота выступающей (балансирной) части не равна высоте пера руля:
Балансирный руль, когда высота балансирной части равна высоте руля.
Балансирный и полубалансирные рули характеризуются коэффициентом компенсации, под которым понимают отношение площади выступающей части к полной площади пера руля:


Число рулей на судне может быть 1, 2, 3, 4 и т.д. Они устанавливаются как за винтами, так и между ними. Наиболее эффективны рули при установке за винтами.
Поворотные направляющие насадки.
– насадки без стабилизатора;
– с неподвижным стабилизатором;
– с управляемым стабилизатором.
По числу опор бывают насадки подвесные и насадки с одной опорой на пятке.
По длине окружности охвата винта насадки бывают полные и неполные.
Полная направляющая насадка представляет собой кольцевое крыло, имеющее в продольном сечении форму аэродинамического профиля и охватывающее с минимальным зазором гребной винт.
Из опыта проектирования и эксплуатации установлены оптимальные размеры:
Поворотные насадки характеризуются коэффициентом раствора αн и коэффициентом расширения βн.

Особенность действия насадки, по сравнению с простым рулем, возникновение гидродинамических сил, стремящихся повернуть насадку на больший угол по отношению к набегающему потоку.
Для компенсации вращающего момента этих сил устанавливается стабилизатор, высота стабилизатора hСТ = ДВЫХ , длина lСТ = 0,6 ДН (при увеличении длины стабилизатора возрастает момент заднего хода МЗ.Х. на баллере, при уменьшении – ухудшается устойчивость судна на курсе).
Применение поворотных насадок (ПН) улучшает условия работы двигателя:
– повышается КПД, так как увеличивается площадь сечения струи винта при прочих равных условиях(частота вращения, упор). Так у буксиров поворотные насадки увеличивают тягу на гаке на 50 % на швартовах, на 20 – 30 % при ходе с составом и может увеличиться скорость порожнем;
– улучшаются условия работы винта при волнении из-за демпфирующего свойства ПН;
– уменьшается качка судна и уменьшаются перепады нагрузки на главных двигателях.
На быстроходных судах ПН не применяют из-за повышенного лобового сопротивления.
3.2. Действие потока воды на перо руля. Поворачивающий судно момент.
При прямолинейном движении судна и отклонении руля от диаметральной плоскости (ДП) на угол α (будем считать равным углу атаки, то есть углу, под которым поток набегает на плоскость пера руля) на пере руля под действием набегающего потока воды возникают силы давления. Поле сил давление может быть представлено равнодействующей силой Р, нормальная составляющая которой Рn направлена перпендикулярно продольной оси пера руля.
Разложим Рn на составляющие:
Р2 = Pn • sinα – продольная составляющая, лежащая практически в диаметральной плоскости. Может быть перенесена в центр тяжести судна. Отсюда видно, что она оказывает дополнительное сопротивление движению судна.
Р1 = Pn • cosα – поперечная составляющая .
Поместим в центр тяжести судна взаимно уравновешивающиеся силы Р′ и Р″, равные и параллельные силе Р1. Силы Р1 и Р′ составляют пару сил, плечо которой можно считать приблизительно равным половине длины судна L. Они образуют момент, поворачивающий судно в сторону перекладки руля.
Сила Р″ называется силой дрейфа. Она сносит судно боком во внешнюю сторону описываемой им дуги и создает, из-за наличия метацентрической высоты, крен судна.
Установлено, что нормальная составляющая Рn пропорциональна площади пера руля, квадрату скорости потока воды из под винтов (скорости движения судна) и sinα.

где: S – площадь пера руля, м 2 ;
k – коэффициент пропорциональности, зависящий от угла перекладки, от обводов корпуса судна, глубины акватории.
Для различных типов рулей значения коэффициента k устанавливаются экспериментально и задаются в виде графиков и таблиц.
Для прямоугольных плоских рулей проф. Полонский предложил аналитическое выражение для коэффициента k:
 [кН]
[кН]
 [кН•м]
[кН•м]
Это выражение имеет максимум при 0 0 . Если взять производную по углу α и приравнять к нулю, то получим:



При решении найдем, что максимальный момент будет при α = 35,9 0 .
Следовательно, для эффективного поворота судна прикладывать руль на больший угол нет необходимости.
Отсюда и требования Регистра – перекладка руля от 35 0 одного борта до 35 0 другого за время менее 30 с.
Источник



