
Что такое следящий привод
 Основное назначение следящих приводов : слежение за вводимым в систему сигналом управления, изменяющимся по заранее неизвестному закону. Следящие приводы составляют большую группу приводов, используемых в промышленности. Наиболее распространенным случаем является отработка движения некоторого входного вала выходным валом привода. При этом повторение движения выходным валом должно осуществляться с требуемой ошибкой. В следящих приводах регулируемой величиной обычно является угол поворота Θ , а само регулирование — регулированием по положению.
Основное назначение следящих приводов : слежение за вводимым в систему сигналом управления, изменяющимся по заранее неизвестному закону. Следящие приводы составляют большую группу приводов, используемых в промышленности. Наиболее распространенным случаем является отработка движения некоторого входного вала выходным валом привода. При этом повторение движения выходным валом должно осуществляться с требуемой ошибкой. В следящих приводах регулируемой величиной обычно является угол поворота Θ , а само регулирование — регулированием по положению.
Функциональная схема следящего привода, приведенная на рис. 1, имеет замкнутую структуру с жесткой отрицательной обратной связью по углу поворота Θ 2 выходного вала.
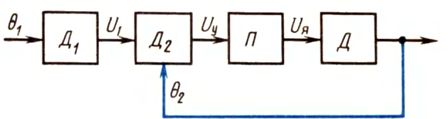
Рис. 1. Функциональная схема следящего привода
Принцип действия следящего привода следующий. Предположим, что между углом Θ1 входного вала и Θ 2 выходного вала появилось некоторое рассогласование, т. е. Θ1 не равно Θ 2. Датчики Д1 и Д2 формируют напряжения, пропорциональные углам поворота, и выдают на вход преобразователя П напряжение управления Uy = U1-U2, где U1 = k1 Θ1, U2 = k2 Θ2 . Поэтому датчики Д1 и Д2 обычно называют измерителями рассогласования . Преобразователь П преобразует Uy в пропорциональный сигнал управления двигателем, которым может быть напряжение подаваемое на якорь.
Напряжение Uy формируется такого знака, чтобы двигатель Д, получив питание, стал поворачивать свой вал в направлении, при котором разность углов Θ 2- Θ1 уменьшалась. Иными словами, следящий привод всегда стремится к непрерывному автоматическому устранению рассогласования между входным и выходным валами.
В качестве измерителя рассогласования в следящем приводе применяют потенциометрический измеритель, сельсин, работающий в трансформаторном режиме, вращающийся трансформатор и др., в качестве устройства преобразователь — двигатель системы Г—Д, ЭМУ-Д, МУ-Д, УВ-Д и др.
Структурная схема простейшей следящей системы, показанная на рис. 2, состоит из сельсина датчика СД, сельсина приемника СП, которые работают в трансформаторном режиме и выполняют функции датчиков Д1 и Д2, т. е. измерителя рассогласования входного угла Θ1 и выходного Θ2 .
Сельсины — это электрические микромашины переменного тока, обладающие способностью самосинхронизации. Их применяют в дистанционных системах передачи угла в качестве датчиков и приемников. Передача угловой величины в такой системе происходит синхронно, синфазно и плавно. При этом между устройством, задающим угол (датчиком), и устройством, принимающим передаваемую величину (приемником), существуют только электрическое соединение в виде линии связи.
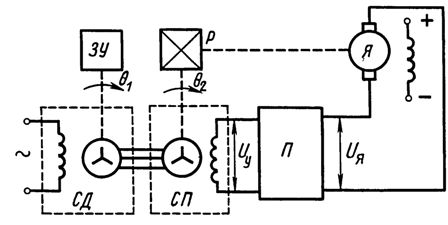
Рис. 2. Схема следящего привода с сельсинами

В систему включается преобразователь, который выпрямляет переменное напряжение однофазной обмотки СП и усиливает его. Преобразователь (см. рис. 2) должен быть знакочувствительным, т. е. в зависимости от фазы сигнала обмотки СП выдавать на якорь двигателя постоянное напряжение положительного или отрицательного знака.
Исполнительный двигатель связан с ротором СП через понижающий редуктор Р. Входной задающий угол поворота Θ1 вводится в систему задающим устройством ЗУ, вал которого связан неподвижно с валом СД. Иногда эта связь осуществляется через редуктор.
Если ЗУ переместит вал СД от его исходного положения в положение угла Θ1 , на выходе однофазной обмотки СП появится переменное напряжение, амплитуда которого пропорциональна разности входного и выходного углов привода Uy = U1 = k1 (Θ1-Θ2) .
Частота напряжения Uy определяется частотой питания однофазной обмотки СД (50, 400 Гц и т. д.). Преобразователь П выпрямляет и усиливает напряжение Uy.
Схемно он может быть представлен фазочувствительным выпрямителем и усилителем постоянного тока, выполненным на различной элементной базе. Например, в качестве выпрямителя может быть использован транзисторный усилитель, а в качестве усилителя — ЭМУ.
Электрический двигатель, получив питание в виде U я в зависимости от полярности этого напряжения начинает поворачивать свой вал и вал СП через редуктор таким образом, что разность углов Θ1 и Θ 2 уменьшается. Как только окажется, что Θ1 — Θ 2 = 0, однофазная обмотка СП перестанет выдавать напряжение Uy, т. е. Uy = 0. Тогда снимется напряжение, подаваемое на якорь двигателя, и он перестанет поворачивать свой вал. Таким образом, система отрабатывает сигнал управления, поступивший извне.
Часто в следящих системах кроме отрицательной связи по углу поворота (по положению) используется обратная связь по частоте вращения. В этом случае схема, приведенная на рис. 2, изменится.
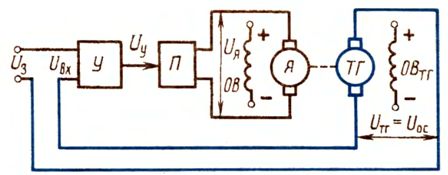
Рис. 4. Схема замкнутого привода с отрицательной обратной связью по частоте вращения
На валу двигателя будет находиться тахогенератор, а напряжение с его обмотки будет подаваться на преобразователь П последовательно с напряжением U у, так как это показано на рис. 4. На практике используют и другие виды обратных связей.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Подписывайтесь на наш канал в Telegram!
Просто пройдите по ссылке и подключитесь к каналу.
Не пропустите обновления, подпишитесь на наши соцсети:
Источник
Цифровой следящий привод Советский патент 1982 года по МПК G05B11/26
Описание патента на изобретение SU941926A1
Изобретение относится к автоматике и может быть использовано в устройствах для регистрации измерительной информации в цифровой форме при высоких требованиях к скорости и точности ее вывода.
Известна цифровая следящая система, содержащая поразрядное кодовое сравнивающее устройство, дающее информацию о рассогласовании кодов приемного регистра и преобразователя угол — код через триггер запом-инания знака разности кодов и триггеры запуска на усилитель и двигатель, с валом которого связан тахогенератор, предназначеный совместно с усилителем постоянного тока для введения скоростной обратной связи. Сигнал управления скоростью отработки вырабатывается триггером управления, подключающим сигнал обратной связи по . скорости через ключ системы М .
Недостатком такой системы является сложность, обусловленная наличием поразрядного разнесенного во времени сравнения кодов, наличием тахогенератора, усилителя постоянного тока и системы управления подключением сигнала обратной связи по скорости в зависимости от величины рассогласования.
Наиболее близким к изобретению является цифровой следящий привод, содержащий первый сумматор, последовательно соединенные входной регистр , блок сравнения, преобразователь код ,цлительность импульса, первый D -триггер и последовательно соединенные блок управления и двигатель, вал которого механически связан с преобразог вателем перемещение — код, разрядные выходы которого подключены к соответствующим вторьи входам блока сравнения 12 ,
Данный привод нормально функционирует лишь при совпадении знаков скорости и перемещения подвижной части, т.е. в первом и третьем квадрантах фазовой плоскости.Во втором и четвертом квадрантах система оказывается неработоспособной и, следовательно, имеет ограниченную область применения, что является ее основным недостатком.
Цель изобретения — расширение области применения привода.
Указанная цель достигается тем, что в цифровой следящий привод введены элемент 2И-ИЛИ, второй, третий,и четвертыйD-триггеры, элемент И, последовательно соединенные второй сумматор и пятыйD -триггер и последовательно соединенные генератор тактовых импульсов и счетчик импульсов, первый выход которого подключен к к первому входу элемента И, второй выход — к вторым входам преобразователя код — длительность импульса и элемента И, а также к .тактовым входам второго, третьего и четвертого D-триггеров, выходы которых соединены соответственно с первым входом сумматора, с первым входом второго сумматора и со вторым входом второго сумматора, третий вход которого подключен к информационному входу четвертого D -триггера и к второму разряному выходу преобразователя перемещение — код, а выход — к информационному входу пятогоD-триггера, тактовый вход которого соединен с выходом элемента И и с тактовым входом перBoroD-триггера, а выход — с первым входом элемента 2И-ИЛЦ, второй, третий и четвертый входы которого подкуиочены соответственно к первому, выходу первогоD-триггера, к второму выходу первогоD-триггера ик знаковому выходу блока сравнения , а выход — к входу блока управления, причем первый разрядный выход преобразователя перемещение — код соединен с тактовыми входами второго и третьего D -триггеров и с вторым входом первого сумматора, выход которого подключен к второму входу счетчика импульсов.
На фиг.1 приведена блок-схема привода; на фиг.2 — фазовые траектории движения привода; на фиг.З — временные диаграммы сигналов на выходах функциональных блоков.
.Цифровой следящий привод содержит входной регистр 1, блок сравнения 2, преобразователь код.- длительность импульса 3, первыйD-триггер 4, элемент 2К-ИЛИ 5, блок управления б,двигатель 7, преобразователь перемещение — код 8, генератор тактовых импульсов 9, счетчик импульсов Ю, элемент .и 11, второйD-триггер 12, третий D -триггер 13, четвертыйD-триггер 14, пятыйD-триггер 15, первый и второй сумматоры 16 и 17, положения изображающей точки подвижной части привода обозначены: — j, выходные сигналы функциональных .блоков привода — иg,f,7 где п — номер функционал ного блока.
Привод работает сл.едукяцим образом
Отработка рассогласования д входного Х и компенсирующего кода t, , Поступающего с преобразователя Перемещение — код 8, происходит по такому закону, чтобы за минимальное время -привести привод в точку нулевого рассогласования с нулевой скоростью. Эта оптимальная с точки зрения быстродействия привода зависимость скорости движения подвижной части системы от рассогласования (линия переключения) формируется преобразователем код — длительность 3. Д еальная скорость движения подвижной части привода в каждый момент време-i ни определяется интервалом времени, за который изменяется младаий разряд кода преобразоват;еля перемещение код 8.
На фиг.2 изображена оптимальная линия переключения (пунктирная линия) и траектория изображающей точки X подвижной части привода. Услйвно взят случай положительной разности и положительной скорости изображающей точки привода, т.е. первый квадрант фазовой плоскости привода. В зависимос ти от положения изображающей точки X привода относительно оптимальной линии переключения, которое определяется D -триггером 4 и знаков скор.ости и рассогласования, определяющих номер квадранта фазовой плоскости, элемент 2И-ШШ 5 совместно с блоком управления б и двигателем 7 осуществляет режим разгона или режим торможения привода.Таким образом -реализуется движение изображающей точки привода, бли.зкое к оптимальной траектории . Преобразователь .код — длительность импульса 3 формирует импульсы определённой длительности в соответствии с кодом разности входного и компенсирующего кодов, поступающим с выходов блока.сравнения 2. Выходной сигнал преобразователя 3 поступает на информационный вход первого D -триггера 4.,который тактируется импульсами с выхода элемента И 11.При каждом изменении млгодшего разряда преобразователя перемещение — код 8 первый сумматор 16 устанавливается В состояние , снимается обнуление счетчика импульсов 10 и.он последовательно проходит несколько состояний. На входы элемента И 11 поступает, прямой и инверсный сигналы старшего разряда счетчика импульсов 10. Поэтому элементом И 11 дешифрируется комбинация . Выходным ригналом элемента И 11 тактируются первый 4 и пятый 15D-триггеры. В 1 -триггер 4 переписывается состояние преобразователя код — длительность импульса 3, а в Р -триггер 15 переписывается сигНс1Л знака скорости с выхода второго сумматора 17. После этого инверсным сигналом старшего разряда счетчика импульсов 10 Щ)оисходит установка преобразователя код — длительность кмпульса 3 в состояние Ч, а задний, фронт этого сигнала тактирует второй 12, третий 13 и четвертый 14 .D-триггеЕил. В результате в них записывается информация, поступающая на информационные входы. При этом на выходе первого сумматора 16 устанавливается , счетчик импульсов 10
обнуляется и находится в этом состоянии до следующего изменения младшего разряда преобразователя перемещение код 8. Если скорость подвижной части привода ниже допустимой в данный.момент времени при данном рассогласовании, то к моменту прихода фронта установка D -триггера 4 закончится формирование импульса в преобразователе код т длительность импульса 3, D -триггер .4 установится в состояние О и двигатель будет разгоняться. Если же скорость выше допустимой в данный момент времени при данном рассогласовании, то формирование импульса не успеет закончиться , D-триггер 4 установится в состояние Ч и включится реверс двигателя. Сигналы знака рассогласования кодов с выхода блока сравнения 2, знака скорости с выхода D-триггера 15 и. сигнал положения изображающей точки привода в данный момент времени, формируемый D -триггером 4, поступают на элемент 2И-ИЛИ 5, выходной сигнал которого вводится в блок управления б двигателем 7.
Направление движения привода определяется по изменению состояний двух младших разрядов компенсирующего кода. Для этого служат третий и четвертыйD-триггеры 13 и 14, второй сумматор 17, осуществляющий суммирование по модулю два и пятыйD -тригге 15.
Таким образом, данный привод позволяет осуществлять управление поло- жением обьекта при любых сочетаниях знаков скорости и рассогласования, что расширяет область применения припривода, и дает определенный техникоэкономический эффект..
Цифровой следящий привод, содержащий первый сумматор, последовательно соединенные входной регистр, блок сравнения, преобразователь код — длительность импульса, первыйD-триггер и последовательно соединенные блок управления и двигатель, вал которого
механически связан с преобразователем перемещение — код, разрядные выходы которого подключены к соответствующим вторым входам блока сравнения, отличающийся тем, что, с целью расширения области применения привода, в него введены элемент 2И-ИЛИ, второй, третий и четвертый О -триггеры, элемент И, последовательно соединенные второй сумматор и пятый D -Триггер и последовательно соединенные генератор тактовых импульсов и счетчик импульсов, первый выход которого подключен к первому входу элемента И, второй выход — к -вторым входам преобразователя код — длительность импульса и элемента И, а также к тактовым входам второго, третьего и четвертого D -триггеров, выходы которых соединены соответственно с первым входом первого сумматора, с первым входом второго сумматора и со вторым входом второго сумматора, третий вход которого подключен к информационному входу четвертого D -триггера и к второму разрядному выходу преобразователя перемещение — кед , а выход — к информационному входу пятого D -триггера, тактовый вход которого соединен с выходом элемента И и с тактовым входом первого D -триггера, а выход — с первым входом элемента 2И-ИЛИ, второй, третий и четвертый входы которого подключены соответственно к первому выходу первого D -триггера, к второму выходу первого D -триггера и к знаковому выходу блока сравнения, а выход — к входу блока управления, причем первый разрядный выход преобразователя перемещение — код соединен с тактовыми входами второго и третьего D -триггеров и с вторым входом первого сумматора, выход которого подключен к второму входу счетчика импульсов.
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 541143, кл. Q 05 В 11/26, 1976.
2.Авторское свидетельство СССР по заявке № 2688045/18-24,
кл. d 05 В 11/26, 1978 (прототип.
Источник



