
Автоматическое поворотное устройство для антенн
Автоматическое устройство для слежения за спутниками создано на основе поворотного устройства от телекамеры (УН-16).
Доработка УН-16 весьма проста — вам нужно механически соединить оси азимута и элевации с переменными резисторами. Резисторы должны быть прецезионными,не менее 2Ком, иначе они будут нагреваться.
Резистор азимута соединять через редуктор,передаточное отношение роли не играет, условие одно: резистор не должен мешать полному повороту (360 градусов) механизма. Для элевации резистор можно прикрепить прямо на ось. Можно, конечно, использовать любые проволочные сопротивления, но по своему опыту я не рекомендую.
Всё остальное изложено в рисунке.
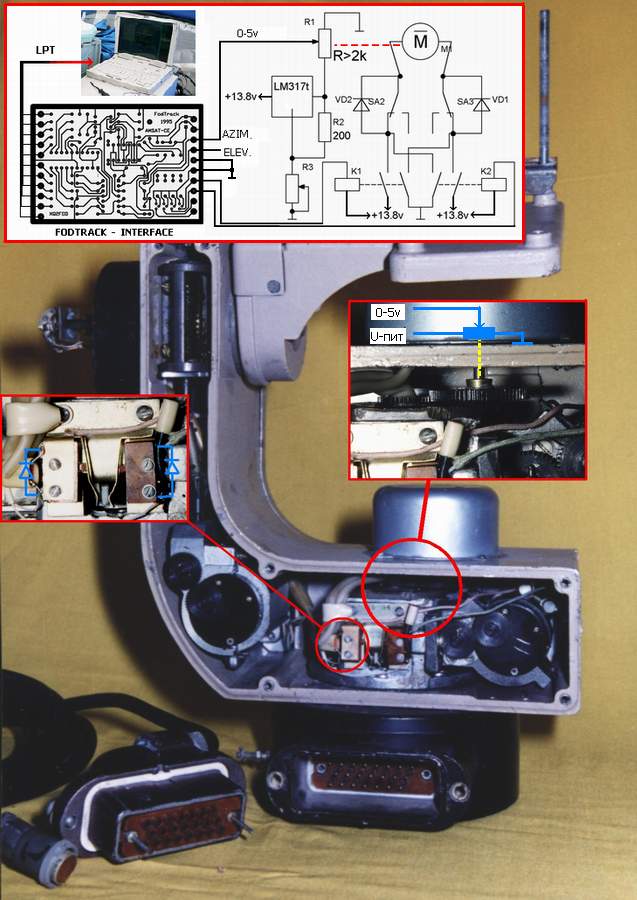
Интерфейс любой,с аналоговым управлением. В моей конструкции используется FODTRACK.
ПОСЛЕ ДЕМОНСТРАЦИИ НА ПЕРЕСЛАВСКОМ СЛЁТЕ РАДИОЛЮБИТЕЛЕЙ В ИЮНЕ 2003 ГОДА АВТОМАТИЧЕСКОГО СЛЕДЯЩЕГО ПОВОРОТНОГО УСТРОЙСТВА И АНТЕНН ДЛЯ СЛЕЖЕНИЯ ЗА Р/Л СПУТНИКАМИ АЛЕКСЕЕМ RW3DVG,

ВОЗНИКЛА НЕОБХОДИМОСТЬ РАССКАЗАТЬ О ТЕХНОЛОГИИ, ПРИМЕНЕННОЙ ПРИ ИЗГОТОВЛЕНИИ АВТОМАТИЧЕСКОГО СЛЕДЯЩЕГО УСТРОЙСТВА И АНТЕНН.
В ИНТЕРНЕТЕ И БУМАЖНЫХ ИЗДАНИЯХ МЫ (RK3DKU&RW3DVG) НЕ ОБНАРУЖИЛИ ПОДОБНЫХ СТАТЕЙ, ОПИСЫВАЮЩИХ ПРОЦЕСС ПОСТРОЕНИЯ СТАНЦИИ ДЛЯ ПРИЁМА СПУТНИКОВ. БЫЛИ НАЙДЕНЫ ТОЛЬКО КРАТКИЕ ССЫЛКИ И ТО — ТОЛЬКО НА ПЛАТНЫЕ РЕСУРСЫ.
НЕУЖЕЛИ У НАС В РОССИИ НЕТ ОПЫТНЫХ ОПЕРАТОРОВ, КОТОРЫЕ РАБОТАЮТ ИЛИ РАБОТАЛИ СО СПУТНИКАМИ? СКОРЕЕ ВСЕГО ЕСТЬ, НО ПОЧЕМУ ОТ НИХ НЕТ НИКАКИХ МАТЕРИАЛОВ ПО ЭТОЙ ТЕМЕ ?
МЫ (RW3DVG&RK3DKU) В ЭТОЙ СТАТЬЕ ПОСТАРАЕМСЯ ДАТЬ ВСЕ БЕСПЛАТНЫЕ РЕСУРСЫ ПО ИЗГОТОВЛЕНИЮ НАЗЕМНОЙ Р/Л СПУТНИКОВОЙ СТАНЦИИ.
САМЫМ ВАЖНЫМ УЗЛОМ ЯВЛЯЕТСЯ ИНТЕРФЕЙС СОПРЯЖЕНИЯ ВАШЕГО КОМПЬЮТЕРА С ПОВОРОТНЫМ УСТРОЙСТВОМ.
FODTRACK — САМЫЙ ПРОСТОЙ В ИЗГОТОВЛЕНИИ ИНТЕРФЕЙС. ЕГО СТОИМОСТЬ ОПРЕДЕЛЯЕТСЯ ЦЕНОЙ МИКРОСХЕМЫ AD7528, КОТОРАЯ В СРЕДНЕМ ПО МОСКВЕ СОСТАВЛЯЕТ 10$ И ТРЕМЯ ОПЕРАЦИОННИКАМИ (LM324 -2ШТ. И LM358 -1ШТ).
РАБОТОСПОСОБНОСТЬ FODTRACK ПРОВЕРЕНА В НАШИХ КОНСТРУКЦИЯХ. ПРОБЛЕМА С НИМ ОДНА — КОМПЬЮТЕР «НЕ ВИДИТ» ИСТИННОЕ ПОЛОЖЕНИЕ АНТЕНН, ОН ТОЛЬКО ПОСЫЛАЕТ КОМАНДЫ ИНТЕРФЕЙСУ , НИЧЕГО НЕ ПОЛУЧАЯ В ОТВЕТ. НО В ЭТОМ НЕТ НИЧЕГО СТРАШНОГО ЕСЛИ ВСЁ В ИСПРАВНОМ СОСТОЯНИИ.
FODTRACK ОСНОВАН НА АНАЛОГОВОМ УПРАВЛЕНИИ. С ВАШЕГО ПОВОРОТНОГО УСТРОЙСТВА НА ИНТЕРФЕЙС ПОСТУПАЮТ ДВА НАПРЯЖЕНИЯ — АЗИМУТ И ЭЛЕВАЦИЯ.
АЗИМУТ 0.5V-5.5V 0-360гр, ЭЛЕВАЦИЯ 0.5V-5.5V 0-180гр. ЭТО ВЫПОЛНЯЕТСЯ ПРИ ПОМОЩИ ПЕРЕМЕННЫХ РЕЗИСТОРОВ, ВКЛЮЧЕННЫХ ПО СХЕМЕ ДЕЛИТЕЛЯ НАПРЯЖЕНИЯ.
С ДВИЖКА РЕЗИСТОРА СНИМАЕТСЯ НАПРЯЖЕНИЕ НА ИНТЕРФЕЙС. ЖЕЛАТЕЛЬНО ИСПОЛЬЗОВАТЬ ВЫСОКОТОЧНЫЕ РЕЗИСТОРЫ,ИНАЧЕ ТОЧНОСТЬ НАВЕДЕНИЯ АНТЕНН НА СПУТНИК БУДЕТ НЕВЫСОКА. ВСЁ ОСТАЛЬНОЕ МОЖНО УВИДЕТЬ В СХЕМЕ ИНТЕРФЕЙСА. ДВИЖКИ РЕЗИСТОРОВ КРЕПЯТЬСЯ К ОСИ АЗИМУТА И ЭЛЕВАЦИИ.
FODTRACK ПОДДЕРЖИВАЕТСЯ ПРОГРАММАМИ SATSCAPE,NOVA И FODTRACK.
СКАЧАТЬ ИНФОРМАЦИЮ ПО ПОСТРОЕНИЮ ИНТЕРФЕЙСА FODTRACK И ПРОГРАММУ МОЖНО ЗДЕСЬ .
AVROT — БОЛЕЕ ИНТЕРЕСНЫЙ ИНТЕРФЕЙС. ОН ВИДИТ ИСТИННОЕ ПОЛОЖЕНИЕ ВАШИХ АНТЕНН, НО НЕ ПРОВЕРЕН НАМИ В РАБОТЕ. ЕСЛИ КТО-ТО ЕГО ИЗГОТОВИТ — ПОЖАЛУЙСТА СООБЩИТЕ РЕЗУЛЬТАТЫ.
AVROT ТОЖЕ ОСНОВАН НА АНАЛОГОВОМ УПРАВЛЕНИИ, НО С БОЛЕЕ ВЫСОКИМ НАПРЯЖЕНИЕМ,ЧТО НЕУДОБНО ДЛЯ РАБОТЫ В ПOЛЕВЫХ УСЛОВИЯХ. ИНТЕРФЕЙС ВЫПОЛНЕН НА AT90S2333.В НЁМ ПРИМЕНЁН ЖИДКОКРИСТАЛЛИЧЕСКИЙ ДИСПЛЕЙ ОТОБРАЖАЮЩИЙ ДЕЙСТВИТЕЛЬНОЕ ПОЛОЖЕНИЕ АНТЕНН.
СКАЧАТЬ ИНФОРМАЦИЮ ПО ПОСТРОЕНИЮ ИНТЕРФЕЙСА AVROT МОЖНО ЗДЕСЬ .
FODTRACK DL7AOT — ИНТЕРЕСНАЯ ШТУКА. ВИДНО ГДЕ АНТЕННЫ, УПРАВЛЕНИЕ ЧЕРЕЗ COM ПОРТ, ПРОСТ В ИЗГОТОВЛЕНИИ, ВЫПОЛНЕН НА PIC16F84AP.
СКАЧАТЬ ИНФОРМАЦИЮ ПО ПОСТРОЕНИЮ ИНТЕРФЕЙСА FODTRACK DL7AOT МОЖНО ЗДЕСЬ.
ЕСТЬ ЕЩЁ НЕСКОЛЬКО ИНТЕРФЕЙСОВ, КОТОРЫЕ, ПО НАШЕМУ МНЕНИЮ, НЕ СТОЯТ ВАШЕГО ВНИМАНИЯ. НО ЭТО ТОЛЬКО НАШЕ МНЕНИЕ.
S.N.A.P. — СКАЧИВАТЬ ИНФОРМАЦИЮ ЗДЕСЬ .
ЭТО НАША ПЕРВАЯ СТАТЬЯ, ПОСВЯЩЕННАЯ РАБОТЕ ЧЕРЕЗ СПУТНИКИ. ВТОРАЯ ЧАСТЬ БУДЕТ ПОСВЯЩЕНА АНТЕННОМУ ХОЗЯЙСТВУ.
КООРДИНАТЫ ДЛЯ СВЯЗИ: 145.6125 (RR3DH), 145.500, e-mail: rk3dku (at) mail.ru , а также в комментариях к этой статье.
p.s. САМОЕ ГЛАВНОЕ В ПЕЧКУ НАС НЕ СУЙТЕ (RW3DVG).
Информацию по интерфейсам можно найти в предыдущей статье.
Источник
Тема: Самодельная поворотка на ПР-1М (UR3VCD)
Опции темы
Поиск по теме


Меня все спрашивают «где посмотреть мою поворотку?», по этому решил выложить небольшое описание своей самоделки.
И так, для вращения стека 2х8эл. на УКВ (2м) на крыше 5-ти этажки, я решил собрать недорогое легкое поворотное устройство. Из доступных и достаточно легких выбор остановил на ПР-1М со скоростью вращения 2 об/мин., а чтобы разгрузить его вал решил трубостойку поддержать ещё одним подшипником. Мачта у меня высотой 5м и состоит из двух трехметровых труб 32х2 и 27х3мм. Таким образом крепить поворотное надо на трубу диаметром 27мм. Именное по этому решил каркас поворотки одевать прямо на кончик мачты. Конструкция поворотного понятна из рисунков и чертежей. Трубостойка выполнена из 2м анодированной трубы 30х2 АД31. На лазере вырезаны 3 детали, выточены детали под подшипник и сальник, все сварено и покрашено или оцинковано:
Меня все спрашивают «где посмотреть мою поворотку?», по этому решил выложить небольшое описание своей самоделки.
И так, для вращения стека 2х8эл. на УКВ (2м) на крыше 5-ти этажки, я решил собрать недорогое легкое поворотное устройство. Из доступных и достаточно легких выбор остановил на ПР-1М со скоростью вращения 2 об/мин., а чтобы разгрузить его вал решил трубостойку поддержать ещё одним подшипником. Мачта у меня высотой 5м и состоит из двух трехметровых труб 32х2 и 27х3мм. Таким образом крепить поворотное надо на трубу диаметром 27мм. Именное по этому решил каркас поворотки одевать прямо на кончик мачты. Конструкция поворотного понятна из рисунков и чертежей. Трубостойка выполнена из 2м анодированной трубы 30х2 АД31. На лазере вырезаны 3 детали, выточены детали под подшипник и сальник, все сварено и покрашено или оцинковано:
Добавлено через 30 минут(ы) :
Для управления этим приводом был изготовлен самодельный пульт. Мне хотелось все сделать просто и понятно. ЖКИ-дисплеии с мелкими непонятными циферками мне не нравится, хотелось видеть стрелку (как с реохордом) и куда она показывает на карте. Но реохорды это прошлый век. Сейчас продают очень простые и компактные шаговые двигатели со встроенным редуктором, а самый простой микроконтроллер может легко им управлять, обрабатывая напряжение от переменного резистора в приводе и подавать питание на двигатель, контролируя границы крайних положений. Программно заложено, что антенна свободно вращается на 360 градусов, дальше загорается индикатор «перекручивания» и перекрутив антенну примерно на 20 градусов привод отключается.
Схема и плата показана на рисунках. В последнюю минуту обнаружил что не имею микросхемы uln2003 в SMD и чтобы проще было переразводить плату, решил запаять её «не по правилам»:
Кнопки пока не использованы (надо в корпусе подготовить место) и вместо одной из кнопок установлена оптопара для определения положения стрелки после включения устройства (на схеме эти изменения не сделал). Резистор датчика положения в приводе на 2кОм.
Краткое описание работы можно посмотреть на видео:
Программа для микроконтроллера писалась на бейсике в программе BascomAVR, там компилировалась и через самодельный STK200 прошивалась в контроллер (внутрисхемно). Прошивку пока выложить не могу, т.к. она на другом ПК.
Последний раз редактировалось ur3vcd; 15.09.2018 в 16:09 .
Источник
Опорно-поворотные устройства
Одним из важнейших элементов антенны является устройство для ее крепления — опорно-поворотное устройство (ОПУ).
ОПУ предназначено для подвески антенной системы и наведения ее луча на спутник-ретранслятор. При этом антенна может быть установлена как неподвижно, и принимать программы только с одного спутника, на который сориентирована, так и на специальном поворотном устройстве для перенацеливания со спутника на спутник.
Конструкция ОПУ должна позволять удерживать приемный луч антенны в направлении на ИСЗ с точностью не хуже одной десятой ширины диаграммы направленности. При малых значениях ширины диаграммы направленности выполнение этого требования является определяющим при конструировании системы наведения.
Опорно-поворотные устройства классифицируются по схеме подвески зеркала. Рассмотрим важнейшие из них с учетом особенностей конструкции при наведении на геостационарный спутник связи.
 |
 |
|
| Рис.7.1. Ориентация антенны с помощью полярной подвески |
|
Полярная подвеска
Огромную популярность в СНТВ приобрела полярная подвеска, которая обладает важным преимуществом: поворотом в одной плоскости можно просматривать видимую часть геостационарной орбиты. Работу полярной подвески поясняет рис.7.1.
Допустим, приемная антенна расположена в точке А и ее азимутальная ось вращения параллельна полярной оси (что и обусловливает название подвески). В этом случае, очевидно, что если выбрать необходимый угол наклона φ и вращать антенну по азимуту, то можно осуществить прием с любого из геостационарных спутников, не затененных Землей.
Вращение антенны осуществляется при помощи электропривода.
Угол наклона φ определяется географической широтой места В:
где R — радиус Земли; Н — высота геостационарной орбиты (35785 км); В — широта места установки.
В расчетах необходимо учитывать, что Земля — это тело, по форме близкое к эллипсоиду вращения с экваториальным радиусом 6378 км и полярным радиусом 6356 км. Для приблизительных расчетов Земля принимается за сферу с радиусом 6371 км.
Первые попытки адаптации полярной подвески, оснащенной электроприводом, к перенацеливанию на все видимые геостационарные спутники не учитывали необходимости небольшого отклонения от истинной полярной оси, вследствие чего удавалось просматривать только часть геостационарной орбиты (рис.7.2).
 | |  |
| ||
| Рис.7.2. Наведение антенны полярной подвеской на геостационарную орбиту: 1 — без отклонения от истинной полярной оси; 2 — с отклонением от истинной полярной оси | | Рис.7.3. Требуемое отклонение азимутальной оси подвески от полярной оси в зависимости от широты места установки |
| ||
Особую трудность при настройке такой системы вызывали антенны с шириной диаграммы направленности менее 1°, так как в этом случае удавалось обеспечить просмотр геостационарной орбиты в секторе около ±30°. Для устранения этого недостатка и обеспечения точности наведения до 0,01° по всей видимой части геостационарной орбиты необходимо произвести отклонение азимутальной оси антенны от истинной полярной оси на некоторый угол α (корректирующий угол), величина которого зависит от географической широты В (рис.7.3).
Величина этого небольшого смещения оси должна учитываться при окончательном расчете угла наклона φ (рис.7.4). Следует помнить, что после расчета φ необходимо от полученной величины отнять значение угла α и производить наклон антенны на угол φ’:
 | |  |
| ||
| Рис.7.4. Пояснение к расчету угла наклона антенны к плоскости геостационарной орбиты | | Рис.7.5. Геометрия полярной подвески |
| ||
Электропривод полярной подвески
Большое количество спутников — ретрансляторов телевизионных программ сделало популярным индивидуальные приемные системы с возможностью дистанционного перенацеливания антенн (позиционирования).
В отличие от профессиональных параболических антенн с электромеханическим слежением по двум координатам и очень точными сельсинными датчиками положения, в СНТВ используют только один простой электромеханический привод, обеспечивающий поворот антенны вокруг полярной оси.
В настоящее время в большинстве конструкций антенных систем СНТВ применяются электроприводы двух конструкций: линейные и «горизонт — горизонт» (планетарного типа). Прежде чем начать рассмотрение электроприводов, необходимо отметить некоторые особенности терминологии.
В России за линейным приводом закрепилось название «актуатор» — от неполностью произносимого английского словосочетания linear actuator, a привод «горизонт — горизонт» (Horizon-to-Horizon Actuators) получил название «супермаунт» (Supermaunt) из-за ярких наклеек с этим словом на корпусе устройства.
|
 |
|
| Рис.7.6. Конструкция линейного привода |
|
В линейном приводе (рисунок 7.6) используется электродвигатель с редуктором, который представляет собой несколько (обычно 2 — 3) шестеренчатых передач и одну передачу «винт — гайка» для перемещения выдвижного штока в фиксированных пределах. Снаружи шток закрыт герметичным кожухом.
Привод работает в достаточно сложных условиях: больших перепадах температур и под воздействием осадков. Поскольку он используется в течение небольшого промежутка времени (во время изменения ориентации антенны), то для удешевления конструкции используют электродвигатели малой мощности, работающие в форсированном режиме.
В случае сильного перегрева мотора термодатчик (биметаллическая пластина) разрывает цепь питания. Напряжение питания электродвигателя составляет, как правило, не более 36 В.
Линейный привод закрепляется на опорно-поворотном устройстве и рефлекторе антенны, как показано на рис.7.7. При выдвижении штока происходит вращение рефлектора вокруг полярной оси подвески.
Линейные приводы классифицируются по расстоянию, на которое выдвигается шток, и по величине нагрузки. Наиболее часто используются устройства, обеспечивающие выдвижение штока на 12, 15, 18, 24 и 36 дюймов.
От мощности электродвигателя и материала, из которого изготовлены шестерни редуктора зависит величина допустимой нагрузки. Наиболее простые и дешевые устройства обеспечивают вращение антенной системы до 360 кг.
В этих моделях установлены пластмассовые шестерни, а самосмазывающаяся передача «винт — гайка» изготовлена из сплава алюминия и бронзы. Более дорогие модели позволяют управлять подвеской весом до 700 кг: здесь уже используются стальные шестерни и шарико-винтовая передача, обладающая меньшей фрикционной нагрузкой и, следовательно, более высоким КПД, что позволяет при том же прикладываемом усилии, как и в случае передачи «винт — гайка», увеличить полезную нагрузку. Конструкции линейных приводов позволяют просматривать сектор геостационарной орбиты до 100°.
Устройства типа «горизонт — горизонт» имеют шестеренчатый механизм, способный вращать антенну от горизонта до горизонта по всему сектору геостационарной орбиты вокруг полярной оси (рис.7.8).
 | |  |
| ||
| Рис.7.7. Линейный привод фирмы COBER | | Рис.7.8. Варианты конструкции полярной подвески типа «горизонт-горизонт» |
| ||
Контроль положения антенны
Ранние модели электроприводов разрабатывались для антенн С-диапазона, имеющих диаметр 3 — 4 м, так как их ручное перенацеливание даже при хорошей погоде является достаточно трудоемким занятием. Эти конструкции были очень просты и, как правило, имели переключатель направления вращения электродвигателя.
 |
|
| Рис.7.9. Схема управления электроприводом антенны |
|
Более совершенным схемотехническим решением является использование системы управления с обратной связью (рис.7.9). Встроенный компаратор обеспечивает подачу напряжения питания на электродвигатель, в то время как элемент обратной связи передает сигнал рассогласования на один из входов компаратора.
Характер сигнала рассогласования зависит от типа элемента обратной связи и положения антенны. Вращение электродвигателя будет продолжаться до тех пор, пока антенна не займет положение, соответствующее сигналу управления.
Выбор необходимого спутника и, следовательно, вывод антенны в требуемую позицию осуществляется при помощи специального устройства управления — позиционера.
Типы элементов обратной связи
Элемент обратной связи — один из компонентов электропривода, предназначенный для получения специального сигнала, известного в теории управления как сигнал рассогласования. Конструктивно элемент обратной связи представляет собой датчик, чувствительный к определенным внешним воздействиям. Наибольшее распространение получили следующие типы датчиков: резистивные, герконовые, оптические и датчики Холла.
Резистивный датчик
Одним из самых первых, использованных в цепи обратной связи, был резистивный датчик. Он представляет собой потенциометр, величина напряжения на выходе которого зависит от положения движка, механически связанного с электродвигателем. При вращении антенны двигатель поворачивает также и движок потенциометра, к которому обычно подводится напряжение питания 4-5 В. Выходное напряжение представляет собой сигнал рассогласования.
Сигналом управления для компаратора является опорное напряжение, подаваемое с позиционера. Компаратор сравнивает опорное напряжение с напряжением обратной связи и включает электродвигатель через реле. Когда оба напряжения сравняются, т. е. когда будет «нулевая, ошибка», компаратор отключит электродвигатель.
Использование резистивного датчика дает меньшую точность по сравнению с другими вследствие зависимости сопротивления потенциометра от воздействия погоды, степени износа и загрязнения контактных поверхностей.
Герконовый датчик
В качестве элемента обратной связи успешно применяются магнитоуправляемые герметичные контакты — герконы, представляющие собой два контакта из магнитного материала в стеклянном вакуумном баллоне, намагничивающиеся и замыкающиеся под действием магнитного поля.
На валу электродвигателя закреплен магнит, который вращается вместе с валом. В результате геркон замыкается при каждом обороте. Следовательно, сигналом обратной связи при использовании геркона является серия импульсов, соответствующая числу произведенных оборотов электродвигателя.
Положению каждого спутника соответствует определенное число импульсов, отличное от нуля. После выбора спутника требуемое значение количества импульсов загружается в контроллер, который определяет, является ли требуемое число больше или меньше текущего. В зависимости от полученного результата начнется вращение электродвигателя в ту или иную сторону на количество оборотов, соответствующее числу импульсов. Компаратор в этом случае включает электродвигатель, производит подсчет количества оборотов и, при совпадении с требуемым числом, отключает электродвигатель.
Оптический датчик
Аналогично рассмотренной выше схеме управления с герконом работает устройство с оптическим датчиком. Различие заключается в самой конструкции датчика. Здесь в качестве элемента обратной связи используются светодиод и фототранзистор.
В этой схеме непрозрачный с прорезью диск установлен в механизме электродвигателя. Светодиод и фототранзистор закреплены на противоположных сторонах диска так, чтобы излучение светодиода попадало на фототранзистор только через прорезь в диске.
В результате фототранзистор генерирует импульс, который через буферный каскад (для придания ему соответствующей формы и амплитуды) поступает на компаратор.
Достоинством такой конструкции является более высокая точность в случае, когда на диске имеется несколько прорезей и, следовательно, каждому обороту будет соответствовать несколько импульсов, что делает эту схему также более помехозащищенной.
|
 |
|
| Рис.7.10. Влияние эффекта Холла на траекторию электронов в полупроводнике п-типа |
|
Датчик Холла
Работа схемы управления с использованием датчика Холла не отличается от схемы работы с герконом, различна лишь конструкция датчика. Принцип действия датчика Холла заключается в воздействии магнитного поля на электрические свойства полупроводника, по которому протекает электрический ток.
Воздействие состоит в том, что при протекании тока в полупроводнике возникает поперечная разность потенциалов, если на этот полупроводник действует магнитное поле, вектор которого перпендикулярен направлению тока. Эффект Холла объясняется тем, что на подвижные носители заряда в магнитном поле действует сила Лоренца, вызывающая их отклонение (рис.7.10).
Электроны под действием силы Лоренца отклоняются к одной из граней полупроводниковой пластинки. На этой грани возникает отрицательный заряд, а на противоположной грани, откуда электроны уходят, — положительный. Между электродами на этих гранях создается разность потенциалов и электрическое поле, которое противодействует смещению электронов под воздействием силы Лоренца.
Когда сила, действующая на электрон со стороны поля, становится равной силе Лоренца, дальнейшее смещение электронов прекращается и наступает равновесное состояние. Из равенства этих сил вытекает:
где UH — напряжение Холла между электродами на гранях; d — расстояние между гранями; v — скорость поступательного движения электронов; В — магнитная индукция.
Из формулы видно, что между напряжением, возникающим при эффекте Холла, и магнитной индукцией, вызывающей это напряжение, существует линейная зависимость. В результате при вращении электродвигателя с магнитом, на выходе датчика Холла образуется последовательность импульсов, число которых соответствует числу оборотов.
Опыт, накопленный при производстве подвесок антенн С-диапазона, оказал большое влияние на конструкцию приводов антенн Ku-диапазона. На его основе можно вывести три общих заключения:
- Использование электронных датчиков более предпочтительно, т. к. с точки зрения теории (и практика это подтверждает), они являются более надежными. Однако их применение ограничивается климатическими условиями (в частности, перепадами температур). Поэтому в российских условиях большее распространение получили герконовые датчики.
- В конструкцию подвески необходимо вводить ограничители вращения антенны для предотвращения механических повреждений.
- Главным фактором, влияющим на работоспособность привода антенны, являются атмосферные воздействия. Основная причина всех отка-зов — проникновение влаги в конструкцию привода.
Источник



